MODULAR SAFETY INTEGRATED CONTROLLER MOSAIC
140 8540780 • 10/07/2020 • Rev.38
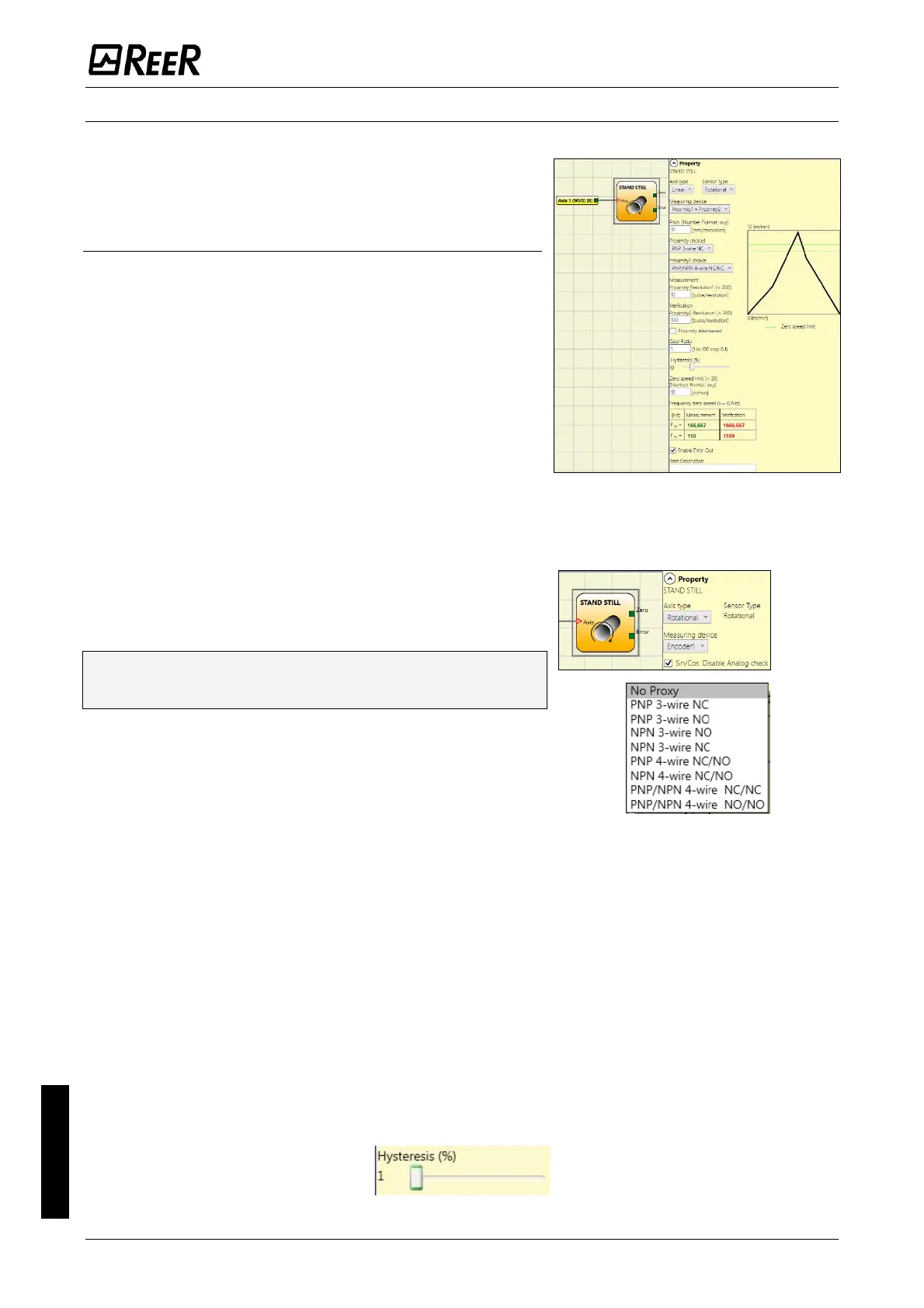
STAND STILL
The StandStill function block monitors the speed of a device,
causing a transition from 0 (FALSE) to 1 (TRUE) of the ZERO
output when the speed is lower than a selected value.
Parameters
Axis type: It defines the type of axis controlled by the device.
It will be Linear in the case of a translation and will be
rotational in the case of motion around an axis.
Sensor Type: When that the previous parameter is Linear,
the Sensor Type defines the type of sensor connected to the
module inputs. It can be rotational (e.g. shaft encoder) or
Linear (e.g. optical array). This choice allows to define the
following parameters.
Measuring device: It defines the type of sensor(s) used. The
possible choices are:
- Encoder
- Proximity
- Encoder+Proximity
- Proximity1+ Proximity2
- Encoder1+ Encoder2
Sin/Cos: Disable Analog check: only when a Sin/Cos
Module is used, it is possible to disable the analog
verification sin
2
θ + cos
2
θ, carrying out a simplified
plausibility check of the Encoder signals.
Please note that when the analog check is disabled the
diagnostic coverage decreases.
Pitch: If the Axis Type chosen was linear and rotational, this
field allows you to enter the sensor pitch to obtain a
conversion between sensor revolutions and distance
travelled.
Proximity choice: It allows you to choose the type of proximity
sensor from PNP, NPN, Normally Open (NA) and Normally Closed
(NC), with 3 or 4 wires.
(In order to ensure a Performance Level = PLe use a proximity
switch type PNP NO: ref. “Interleaved proximity -> page 25).
Measurement: Enter in this field the number of pulses/revolution (in the case of rotational sensor)
or µm/pulse (linear sensor) relating to the sensor used
Verification: Enter in this field the number of pulses/revolution (in the case of rotational sensor) or
µm/pulse (linear sensor) relating to the second sensor used.
Gear Ratio: This parameter is active if there are two sensors on the selected axis. This parameter
allows you to enter the ratio between the two sensors. If both sensors are on the same moving parts,
the ratio will be 1 otherwise the number corresponding to the report must be entered. E.g. there are
an encoder and a proximity switch, and the latter is on a moving part that (due to a gear reduction
ratio) rotates at twice the speed of the encoder. Therefore, this value must be set at 2.
Hysteresis (%): It represents the percentage hysteresis (the percentage is calculated from the
threshold value) below which the speed change is filtered.

 Loading...
Loading...




