116 Rockwell Automation Publication 2071-UM001E-EN-P - November 2013
Chapter 9 Maintain and Troubleshoot Your Kinetix 3 Servo Drive
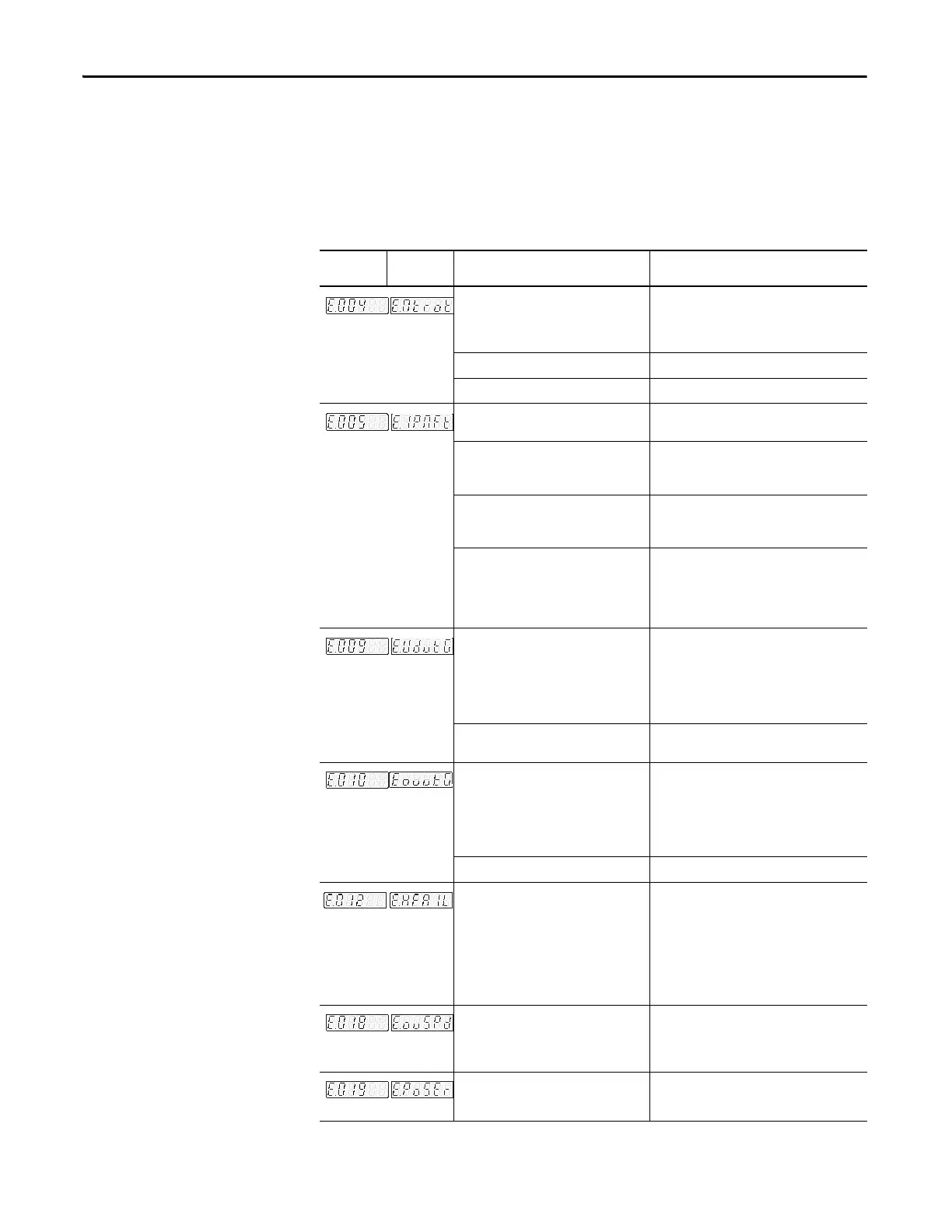
Error Displays
Errors are serious abnormalities that cause loss of motor control. The Error
display alternates between a three-digit error code and a six-digit text message.
The error displays repeat until the anomaly is cleared.
Table 35 - Error Displays
Error
Code
Text
Message
Possible Cause Action/Solution
Motor Overtemperature
Motor thermal switch trips due to:
• High motor ambient temperature.
• Excessive current.
• Operate within (not above) the continuous
torque rating for the ambient temperature.
• Lower ambient temperature, or increase
motor cooling.
Motor wiring error. Check motor wiring.
Incorrect motor selection. Verify the proper motor has been selected.
IPM Error
Motor power cables shorted. Verify continuity of motor power cable and
connector.
Motor winding shorted internally. Disconnect motor power cables from the motor.
If the motor is difficult to turn by hand, it can
need to be replaced.
Operation above continuous power rating. • Verify ambient temperature is not too high.
• Operate within the continuous power rating.
• Reduce acceleration rates.
Drive has a bad IPM output, short circuit, or
overcurrent.
Remove all power and motors connections,
then perform a continuity check from the DC
bus to the U, V, and W motor terminals. If
continuity exists, check for wire strands
between terminals, or replace the drive.
Bus Undervoltage
Low AC line/AC power input. • Verify voltage level of the incoming AC
power.
• Check AC power sources for glitches or line
drop.
• Install uninterruptible power supply (UPS)
on the AC input.
Attempted to enable drive without main
power active.
Apply main power before enabling drive.
Bus Overvoltage
Excessive regeneration of power (that is
when the motor is driven by an external
mechanical force, it can regenerate too
much peak energy through the drive’s
power supply and the drive faults to save
itself from an overload.)
• Verify shunt circuit.
• Adjust motion profile to stay within the
range of the regenerative resistor.
• Replace regenerative transistor.
• Replace the drive.
Excessive AC input voltage. Verify input is within specification.
Home Search Failed
Homing is not complete within the time
defined in Homing time limit (IN-01.11) is
elapsed.
• Increase the time defined in Homing time
limit (IN-01.11).
• Set a value other than '0' in Homing Velocity
(IN-01.02) and Creep Velocity (IN-01.03).
• Check if there is any obstacle that disturbs
Homing.
• Check mechanical parts and parameter
settings for Homing.
Motor Overspeed
Motor speed exceeds maximum. • Confirm encoder wiring.
• Retune drive system.
• Verify input gain of external speed or torque
command.
Excess Position Error
Position error exceeds permitted value. • Increase following error limit.
• Check position loop tuning.
 Loading...
Loading...









