Rockwell Automation Publication 2198-UM001M-EN-P - November 2022 65
Chapter 4 Connector Data and Feature Descriptions
Feedback Specifications The Kinetix 5500 drive accepts motor feedback signals from Stegmann
Hiperface digital-servo-link (DSL) encoders on the motor feedback (MF)
connector.
The Kinetix 5500 drives support Kinetix VP motors with Stegmann Hiperface
digital-servo-link (DSL) encoders by using the 2-pin (MF) feedback connector.
You can also use the MF connector for feedback-only applications.
Other Allen-Bradley motors and actuators with Stegmann Hiperface single-
turn or multi-turn high-resolution absolute encoders are also accepted, but
only when using drive firmware revision 2.002 or later, and the 2198-H2DCK
Hiperface-to-DSL (series B or later) feedback converter kit.
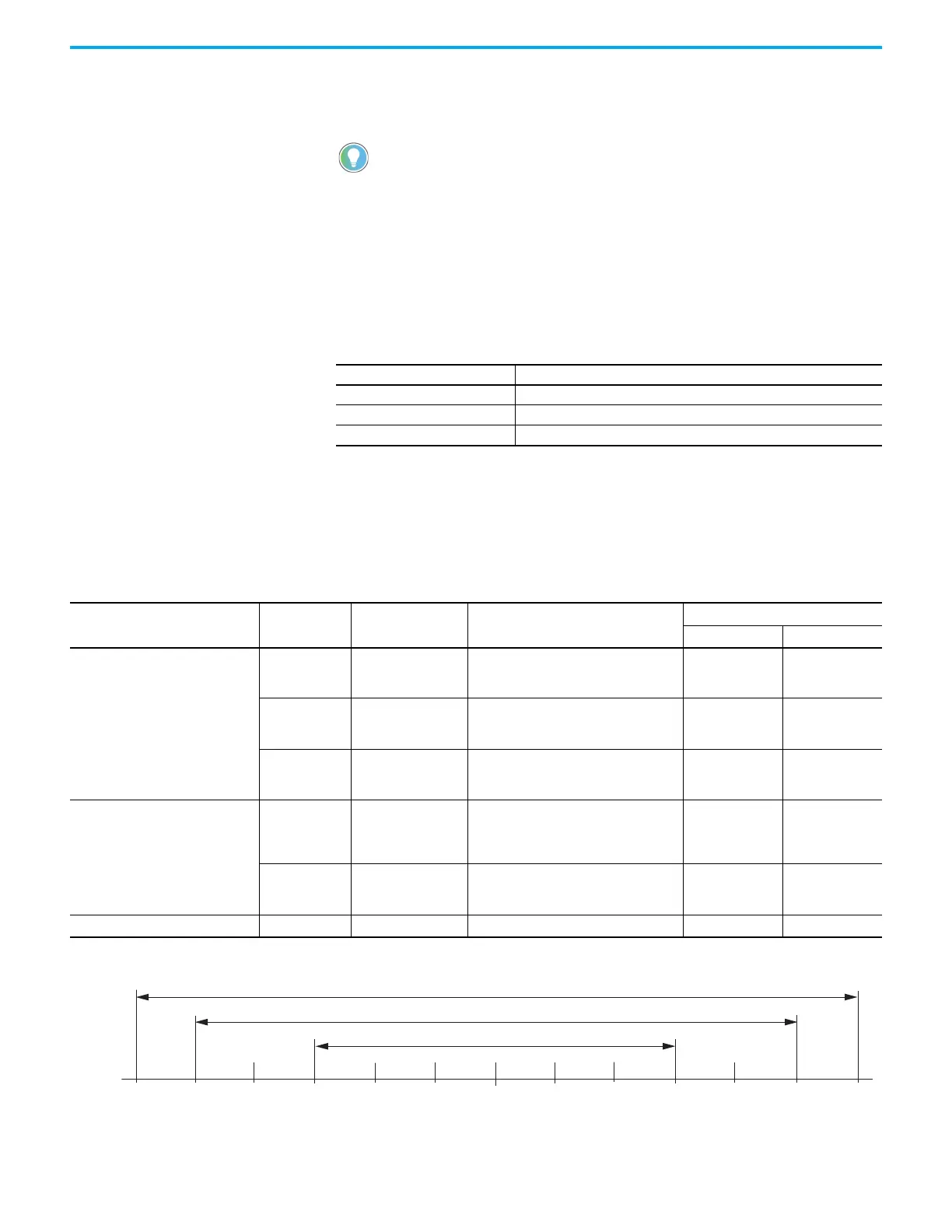
Absolute Position Feature
The absolute position feature of the drive tracks the position of the motor,
within the multi-turn retention limits, while the drive is powered off. The
absolute position feature is available with only multi-turn encoders.
Figure 36 - Absolute Position Limits (measured in turns)
Auto configuration in the Logix Designer application of intelligent absolute, high-
resolution encoders is possible with only Allen-Bradley motors.
Table 33 - Stegmann Hiperface DSL Specifications
Attribute Value
Protocol Hiperface DSL
Memory support Programmed with Allen-Bradley motor data
Hiperface data communication 9.375 Mbits/s
Table 34 - Absolute Position Retention Limits
Encoder Type
Cat. No.
Designator
Motor Cat. No. Actuator Cat. No.
Retention Limits
Turns (rotary) mm (linear)
Hiperface (DSL)
-P
VPL-A/Bxxxxx-P
VPF-A/Bxxxxx-P
VPS-Bxxxxx-P
VPAR-A/Bxxxxx-P 4096 (±2048) —
-W
VPL-A/Bxxxxx-W,
VPF-A/Bxxxxx-W
VPH-A/Bxxxxx-W
VPAR-Bxxxxx-W 4096 (±2048) —
-Q
VPL-A/Bxxxxx-Q
VPF-A/Bxxxxx-Q
VPH-A/Bxxxxx-Q
VPAR-Bxxxxx-Q 512 (±256) —
Hiperface
-M
MPL-A/Bxxxxx-M
MPM-A/Bxxxxx-M
MPF-A/Bxxxxx-M
MPS-A/Bxxxxx-M
MPAR-A/B3xxxx-M
MPAI-A/BxxxxxM
2048 (±1024) —
-V MPL-A/Bxxxxx-V
MPAS-A/Bxxxx1-V05, MPAS-A/Bxxxx2-V20
MPAR-A/B1xxxx-V, MPAR-A/B2xxxx-V
MPAI-A/BxxxxxV
4096 (±2048) —
Stegmann Hiperface (magnetic scale) -xDx —LDAT-Sxxxxxx-xDx —960 (37.8)
+2048-2048 +1024-1024
+64
-64
+256-256
+512
-512
0
-128
+128
Position at Power Down
4096 Turns
2048 Turns
512 Turns

 Loading...
Loading...








