Bit no. Name Meaning
14 move_zero Activate the TLS mode "go to zero positions"
15 as_on Skew-damping On/Off
Note
Out, in, up, down refer to the Figure 7-4 Directions of movement (Page 240).
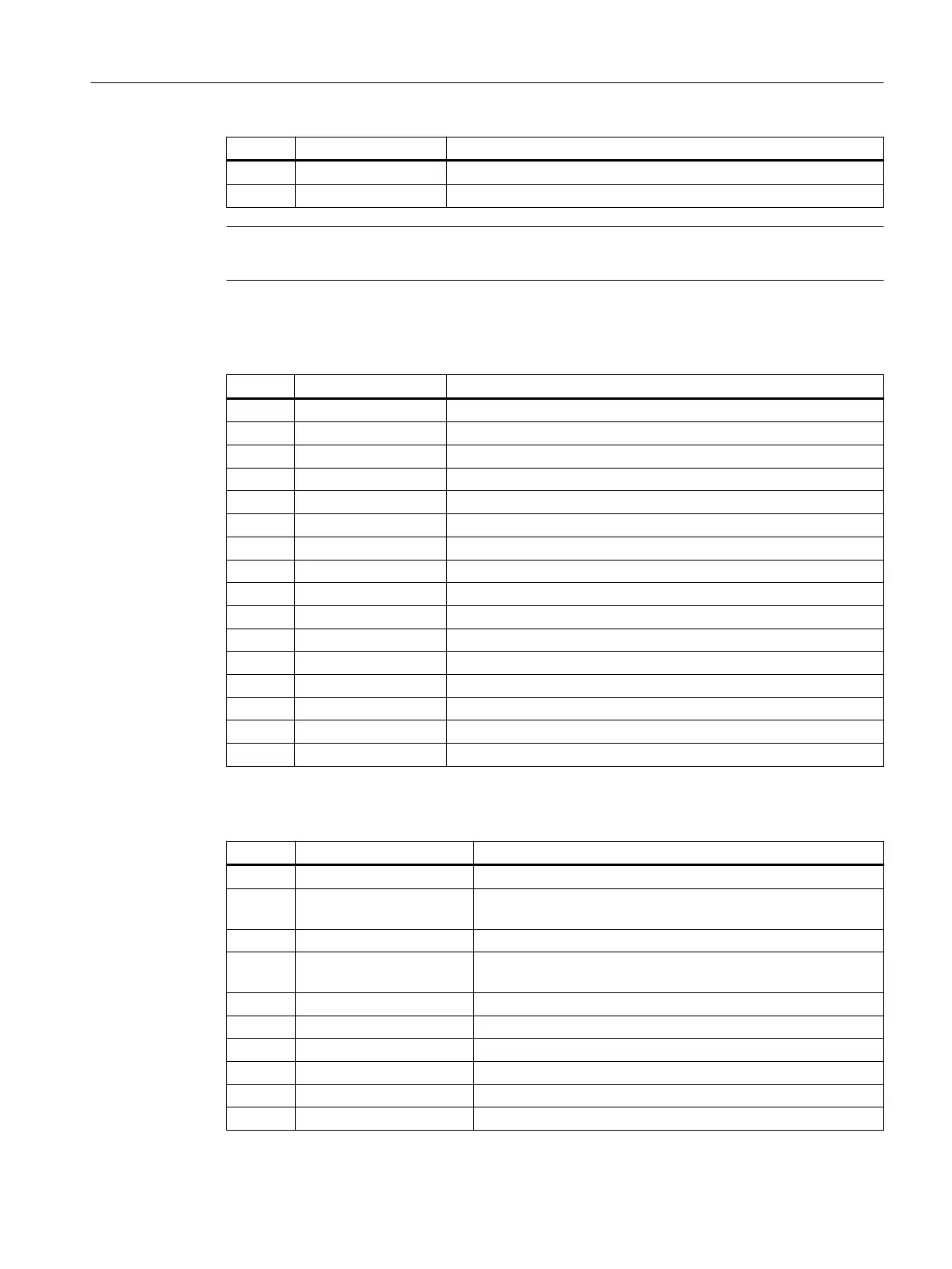
Table 3-14 Control bits in control word 2
Bit no. Name Meaning
0 a_in_comm Cylinder jogging: Retract cylinder A
1 b_in_comm Cylinder jogging: Retract cylinder B
2 c_in_comm Cylinder jogging: Retract cylinder C
3 d_in_comm Cylinder jogging: Retract cylinder D
4 a_out_comm Cylinder jogging: Extend cylinder A
5 b_out_comm Cylinder jogging: Extend cylinder B
6 c_out_comm Cylinder jogging: Extend cylinder C
7 d_out_comm Cylinder jogging: Extend cylinder D
8 skewpos_ext Set position for the skew drive is specified from an external source
9 SkA_in_comm Move skew axis in
10 SkA_out_comm Move skew axis out
11 move_SkA Activate position control of electric skew drive
12 reset_mdl Reset internal oscillation model
13 hold_trim_list Hold the trim and list positions
14 - Reserved
15 - Reserved
Table 3-15 Status bits in status word 1
Bit no. Name Meaning
0 - -
1 motion_terminated_SkA Motion terminated,
skew drive
2 zero Zero position reached
3 motion_terminated Motion terminated,
cylinder
4 skew_removed Skew oscillation eliminated
5 -
6 -
7 -
8 a_out Extend cylinder A
9 b_out Extend cylinder B
Overview of the software
3.3 Sway control function blocks
SC integrated STS, GSU
Operating Instructions, 07/2019, A5E48271265B AA 51
 Loading...
Loading...