7.3 Basic Functions Settings
7-13
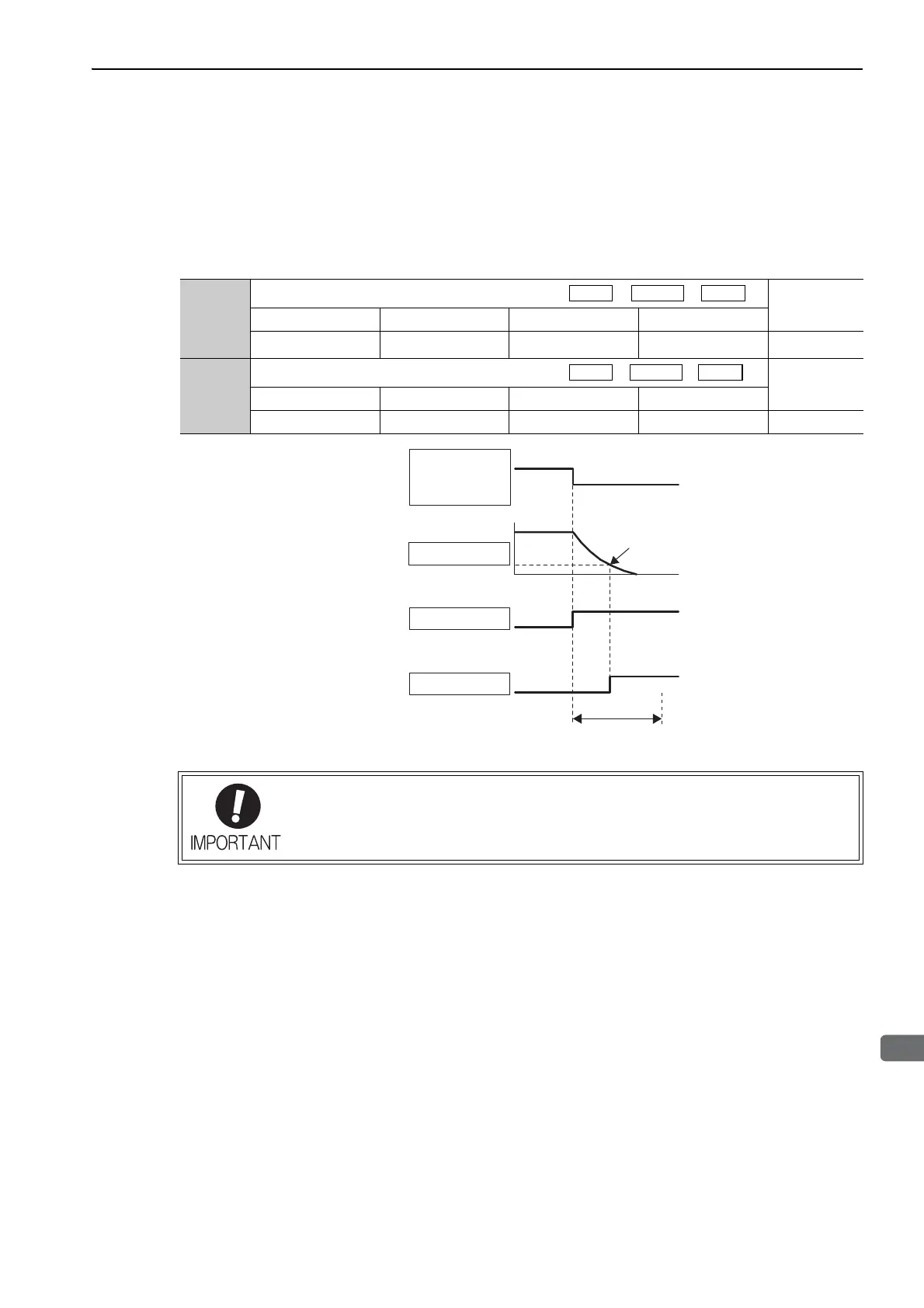
(4) Brake Signal (/BK) Output Timing during Servomotor Rotation
If an alarm occurs while the servomotor is rotating, the servomotor will come to a stop and the brake signal
(/BK) will be turned OFF. The timing of brake signal (/BK) output can be adjusted by setting the brake refer-
ence output speed level (Pn507) and the waiting time for brake signal when motor running (Pn508).
Note: If the servomotor is set so that it comes to a zero-speed stop for an alarm, follow the information in (3) Brake ON
Timing after the Servomotor Stops after the servomotor comes to a stop for a zero position reference.
Brake Reference Output Speed Level
Classification
Pn507 Setting Range Setting Unit Factory Setting When Enabled
0 to 10000
1 min
-1
100 Immediately Setup
Waiting Time for Brake Signal When Motor Running
Classification
Pn508 Setting Range Setting Unit Factory Setting When Enabled
10 to 100 10 ms 50 Immediately Setup
/BK Signal Output Conditions
When Servomotor Rotating
The /BK signal goes to high level
(brake ON) when either of the fol-
lowing conditions is satisfied:
• When the motor speed falls
below the level set in Pn507
after the power to the servomo-
tor is turned OFF.
• When the time set in Pn508 is
exceeded after the power to the
servomotor is turned OFF.
• The servomotor will be limited to its maximum speed even if the value set in Pn507 is
higher than the maximum speed.
SV_OFF
command
Motor speed
Pn-507
Servo ON
Servo OFF
Pn508
Power to motor
ON
OFF
/BK output
Brake
released
(ON)
Brake applied
(OFF)
or alarm or
power OFF
Motor stopped by
coastingPn001.0

 Loading...
Loading...






