11 Appendix
11.2.2 MECHATROLINK-III Common Parameters
11-20
11.2.2 MECHATROLINK-III Common Parameters
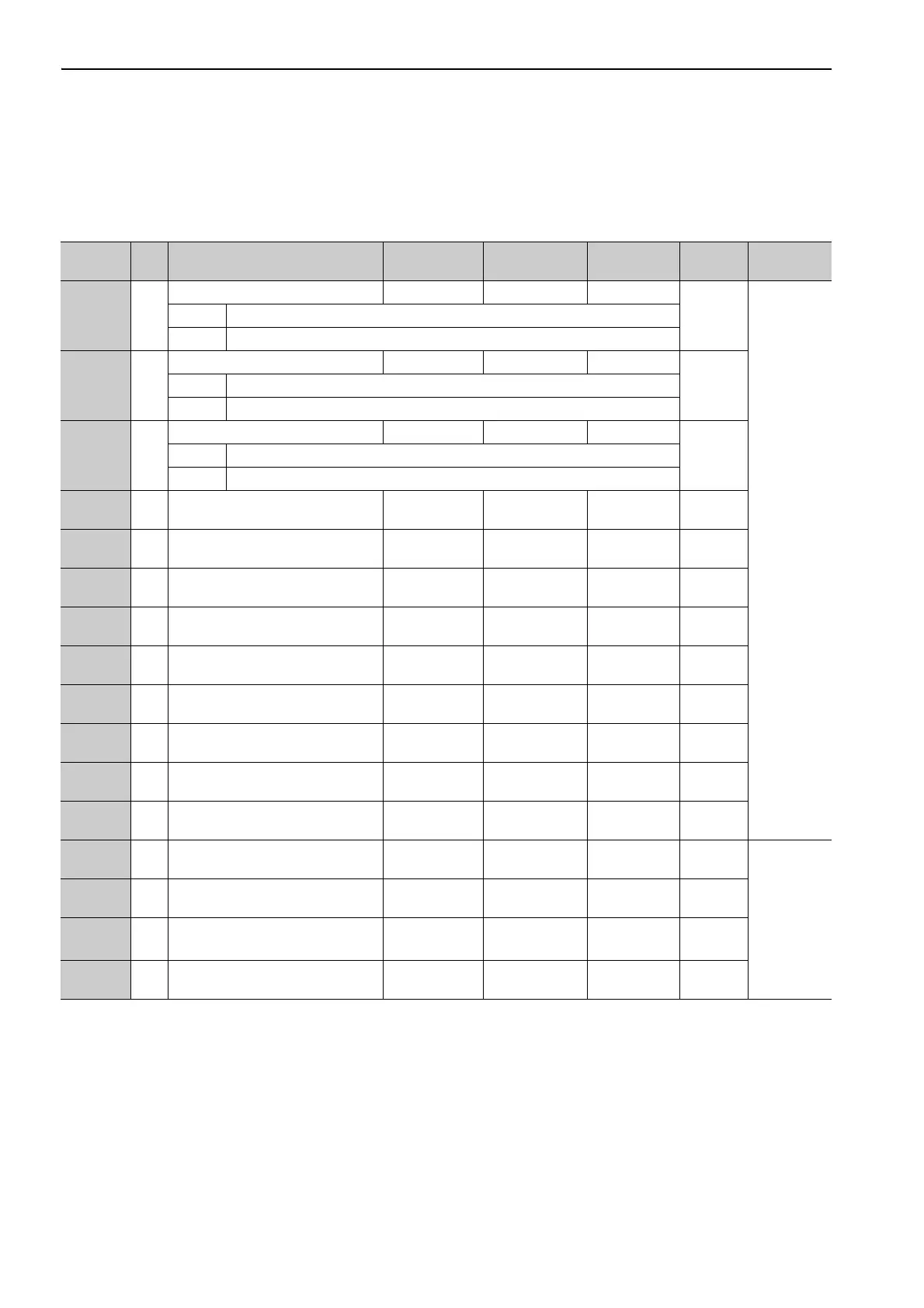
The following list shows the common parameters used by all devices for MECHATROLINK-III. These com-
mon parameters are used to make settings from the host controller via MECHATROLINK communications.
Do not change settings with the SigmaWin+ or any other device.
Parameter
No.
Size Name Setting Range
Units
[Resolution]
Factory
Setting
When
Enabled
Classifica-
tion
01
PnA02
4
Encoder Type (read only) 0 and 1 – –
–
Device
Information
Related
Parameters
0000H Absolute encoder
0001H Incremental encoder
02
PnA04
4
Motor Type (read only) 0 and 1 – –
–0000H Rotational servomotor
0001H Linear servomotor
03
PnA06
4
Reserved (Do not use.) – – –
–0000H Semi-closed
0001H Fully-closed
04
PnA08
4 Rated Speed (read only)
0 to
FFFFFFFFH
min
-1
––
05
PnA0A
4 Maximum Output Speed (read only)
0 to
FFFFFFFFH
min
-1
––
06
PnA0C
4 Speed Multiplier (read only) – – – –
07
PnA0E
4 Rated Torque (read only)
0 to
FFFFFFFFH
Nm––
08
PnA10
4
Maximum Output Torque (read
only)
0 to
FFFFFFFFH
Nm––
09
PnA12
4 Torque Multiplier (read only) – – – –
0A
PnA14
4 Resolution (read only)
0 to
FFFFFFFFH
pulse/rev – –
0B
PnA16
4Scale Pitch – – – –
0C
PnA18
4 Pulses per Scale Pitch – – – –
21
PnA42
4 Electronic Gear Ratio (Numerator)
1 to
1073741824
–1
After
restart
Machine
Specification
Related
Parameters
22
PnA44
4
Electronic Gear Ratio (Denomina-
tor)
1 to
1073741824
–1
After
restart
23
PnA46
4 Absolute Encoder Origin Offset
–1073741823
to 1073741823
1 reference unit 0
Immedi-
ately
*1
24
PnA48
4 Multiturn Limit Setting 0 to 65535 Rev 65535
After
restart
∗1. Available after the SENS_ON command is input.
Note: When using parameters that are enabled after restarting the SERVOPACK, a CONFIG command must be input or
the power must be turned OFF and then ON again.

 Loading...
Loading...






