7.6 Absolute Encoder Setting
7-23
7.6 Absolute Encoder Setting
If using an absolute encoder, a system to detect the absolute position can be designed for use with the host
controller. As a result, an operation can be performed without a zero point return operation immediately after
the power is turned ON.
A battery case is required to save position data in the absolute encoder.
The battery is attached to the battery case of the encoder cable.
Set Pn002.2 to 0 (factory setting) to use the absolute encoder.
A battery is not required if you use an absolute encoder as an incremental encoder.
Refer to 5.5.3 Servomotor and Encoder Connection Examples for absolute encoder connections.
7.6.1 Absolute Encoder Setup
Setting up the absolute encoder is necessary in the following cases.
• When starting the machine for the first time
• When an encoder backup error alarm (A.810) is generated
• When an encoder checksum error alarm (A.820) is generated
• When initializing the rotational serial data of the absolute encoder
(1) Precautions on Setup
• If the following absolute encoder alarms are displayed, cancel the alarm by using the same method as the
absolute encoder setup. They cannot be canceled with the SERVOPACK Clear Warning or Alarm command
(ALM_CLR).
• Encoder backup error alarm (A.810)
• Encoder checksum error alarm (A.820)
• Any other alarms (A.8) that monitor the inside of the encoder should be canceled by turning OFF the
power.
(2) Preparation
Always confirm that the servo is OFF before you set up (initialize) the absolute encoder or reset encoder
alarms.
(3) Operating Procedure
Use the following procedure.
Supplemental Information
This setting can be performed using the write memory command (MEM_WR). Refer to the
Σ
-V-MD Series
User’s Manual MECHATROLINK-III Standard Servo Profile Commands (Manual No.: SIEP S800001 03) for
details on the Write Memory (MEM_WR) command.
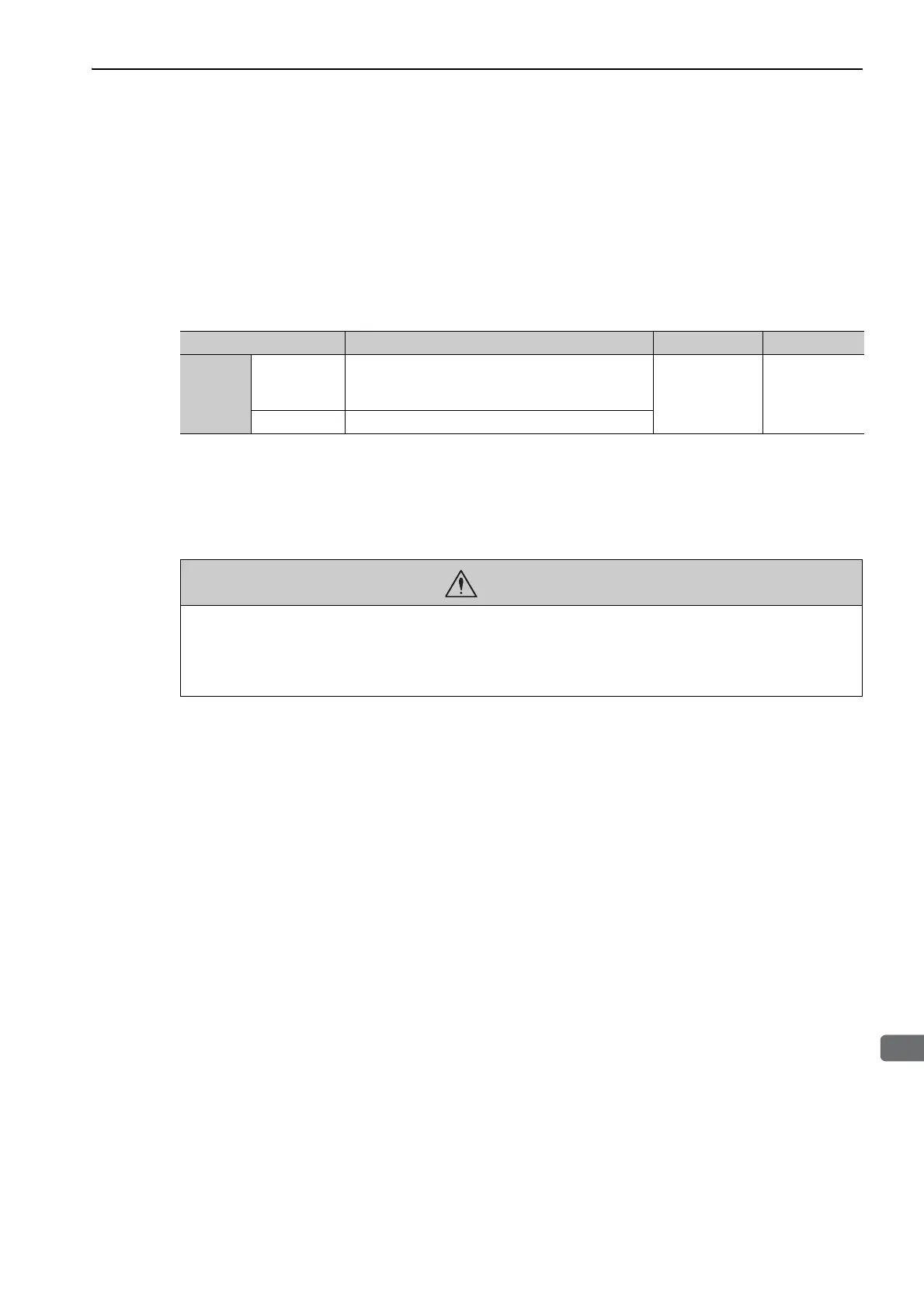
Parameter Meaning When Enabled Classification
Pn002
n.0
[Factory
setting]
Uses the absolute encoder as an absolute encoder.
After restart Setup
n.1 Uses the absolute encoder as an incremental encoder.
CAUTION
• The rotational data will be a value between -2 and +2 rotations when the absolute encoder setup is exe-
cuted. The reference position of the machine system will change. Set the reference position of the host
controller to the position after setup.
If the machine is started without adjusting the position of the host controller, unexpected operation may
cause injury or damage to the machine. Take sufficient care when operating the machine.

 Loading...
Loading...






