3 Specifications and Dimensional Drawings
3.1.1 Ratings and Specifications
3-4
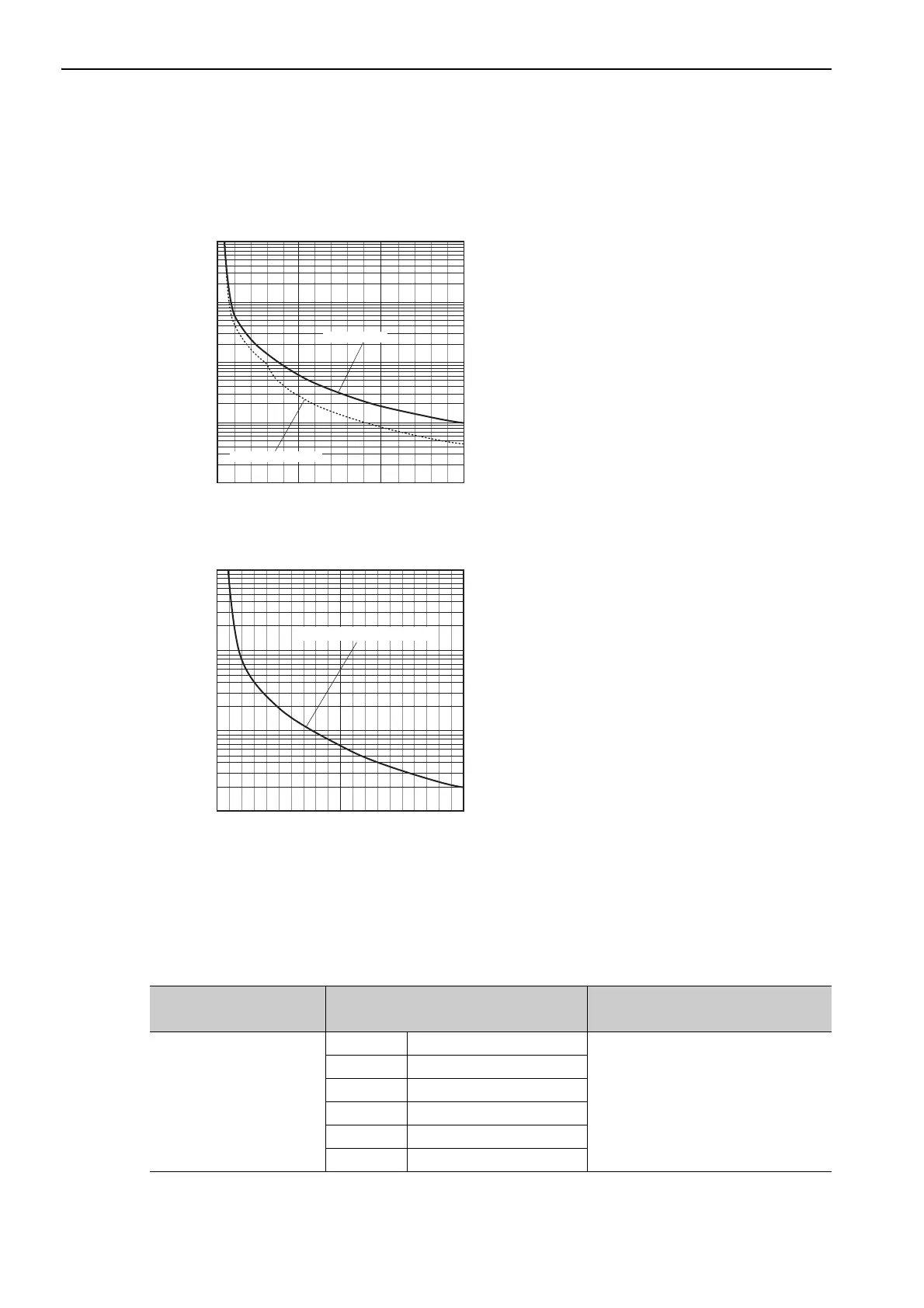
(3) Overload Characteristics
The overload detection level is set under hot start conditions at a servomotor surrounding air temperature of
40°C.
Note: Overload characteristics shown above do not guarantee continuous duty of 100% or more output. Use a servomotor
with effective torque within the continuous duty zone of Torque-Motor Speed Characteristics.
(4) Allowable Load Moment of Inertia at the Motor Shaft
The rotor moment of inertia ratio is the value for a servomotor without a gear and a holding brake.
Detecting time (s)
1000
100
10
1
0.1
100 150 200 250
Torque reference (percent of rated torque)
(%)
SGMMV-B3E, -B5E
SGMMV-B9E
1000
100
10
1
100 200 300
SGMMV-A1,-A2,-A3
Detecting time (s)
Torque reference (percent of rated torque)
(%)
Servomotor Model Servomotor Rated Output
Allowable Load Moment of Inertia
(Rotor Moment of Inertia Ratio)
SGMMV–
B3 3.3 W
30 times
B5 5.5 W
B9 11 W
A1 10 W
A2 20 W
A3 30 W

 Loading...
Loading...






