4.1 User Program Types and Execution Timing
4.1.2 Motion Programs
4-12
4.1.2
Motion Programs
A motion program is a program that is written in a text-based motion language.
There are two types of motion programs.
Note: There are cases when the M-EXECUTOR cannot be used. Refer to the following section for details.
The M-EXECUTOR (page 4-26)
Typ e
Designation
Method
Features Number of Programs
Main programs
MPM
(
=1 to 512)
• Main programs are called
from a DWG.H drawing.
• Main programs are called
from the M-EXECUTOR pro-
gram execution definitions.
You can create up to 512 motion
programs, including the following
programs:
• Motion main programs
• Motion subprograms
• Sequence main programs
• Sequence subprograms
Subprograms
MPS
(
=1 to 512)
Subprograms are called from
a main program.
1. The same numbers are used to manage the motion programs and sequence programs. Use a
unique number for each program.
• Motion program numbers are given in the form MPM or MPS.
• Sequence program numbers are given in the form SPM or SPS.
2. The number of motion programs that can be executed simultaneously depends on the model
of the Machine Controller. If the number of simultaneously executable programs is exceeded,
an alarm will occur (No System Work Available Error).
• The No System Work Available Error is indicated by bit E in the Status Flags of the motion
program.
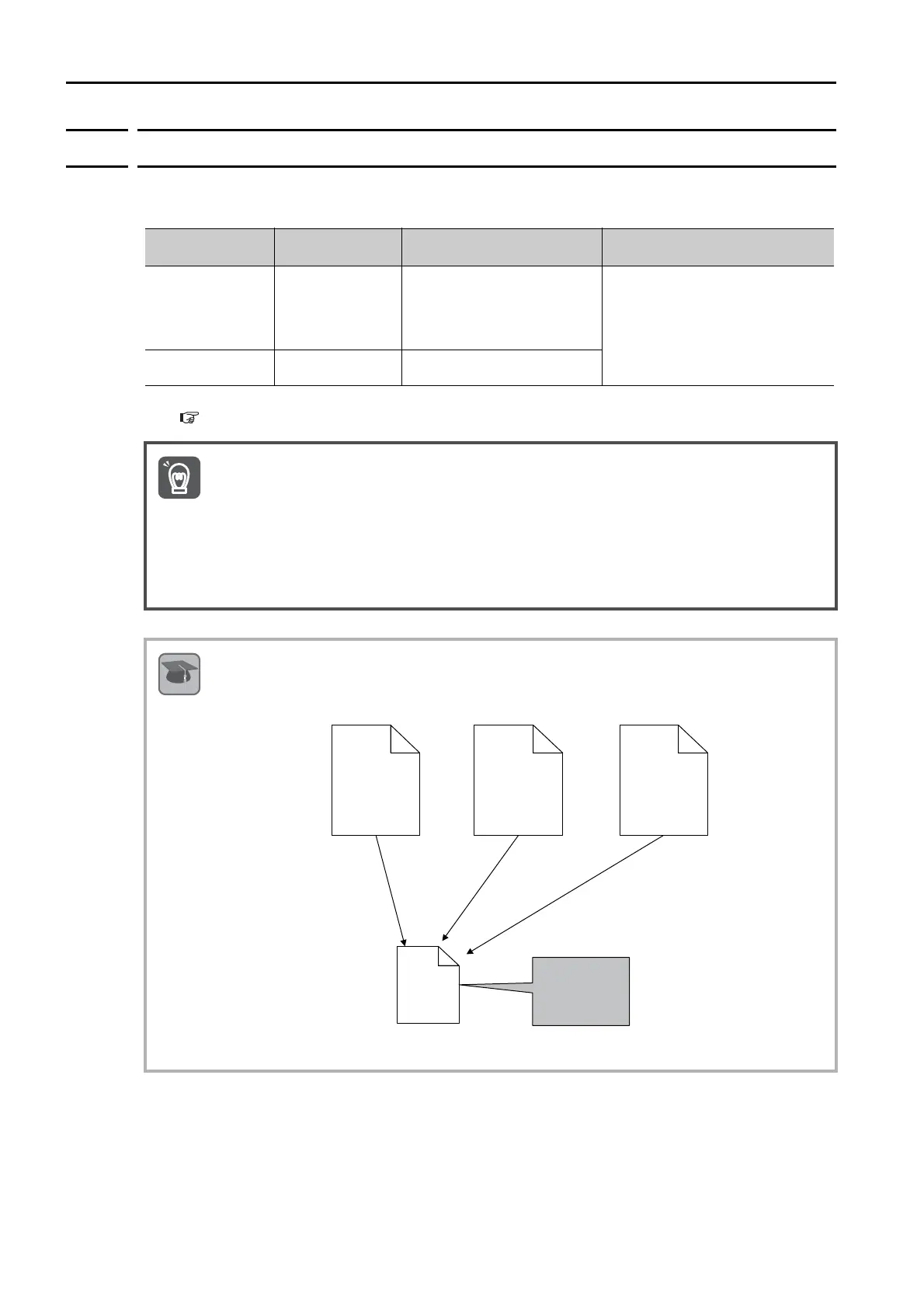
Motion Subprograms
Subprograms are created to perform common operations. They help minimizing the number of
program steps and allow efficient use of memory.
Term
MPM001 MPM002 MPM003
MPS010
Main program
Call
(MSEE)
Call
(MSEE)
Call
(MSEE)
Subprogram
The common
process is
written as a
subprogram.
Main programMain program

 Loading...
Loading...






