7. Service Procedures (Undefined variable: MyVariables.ProductName)
Replacing the Outer Link Harness Part Number: PF40-DI-00010 Rev. A
Replacing the Outer Link Harness does not require unmounting the robot from its surface. To
replace the Outer Link Harness, perform the following procedure:
Step Action
1.
Remove the Inner Link Cover.
2.
Remove the Outer Link Cover.
3.
Unwind the Outer Link in counterclockwise direction, looking down from above the J3 axis until it
reaches the hard stop.
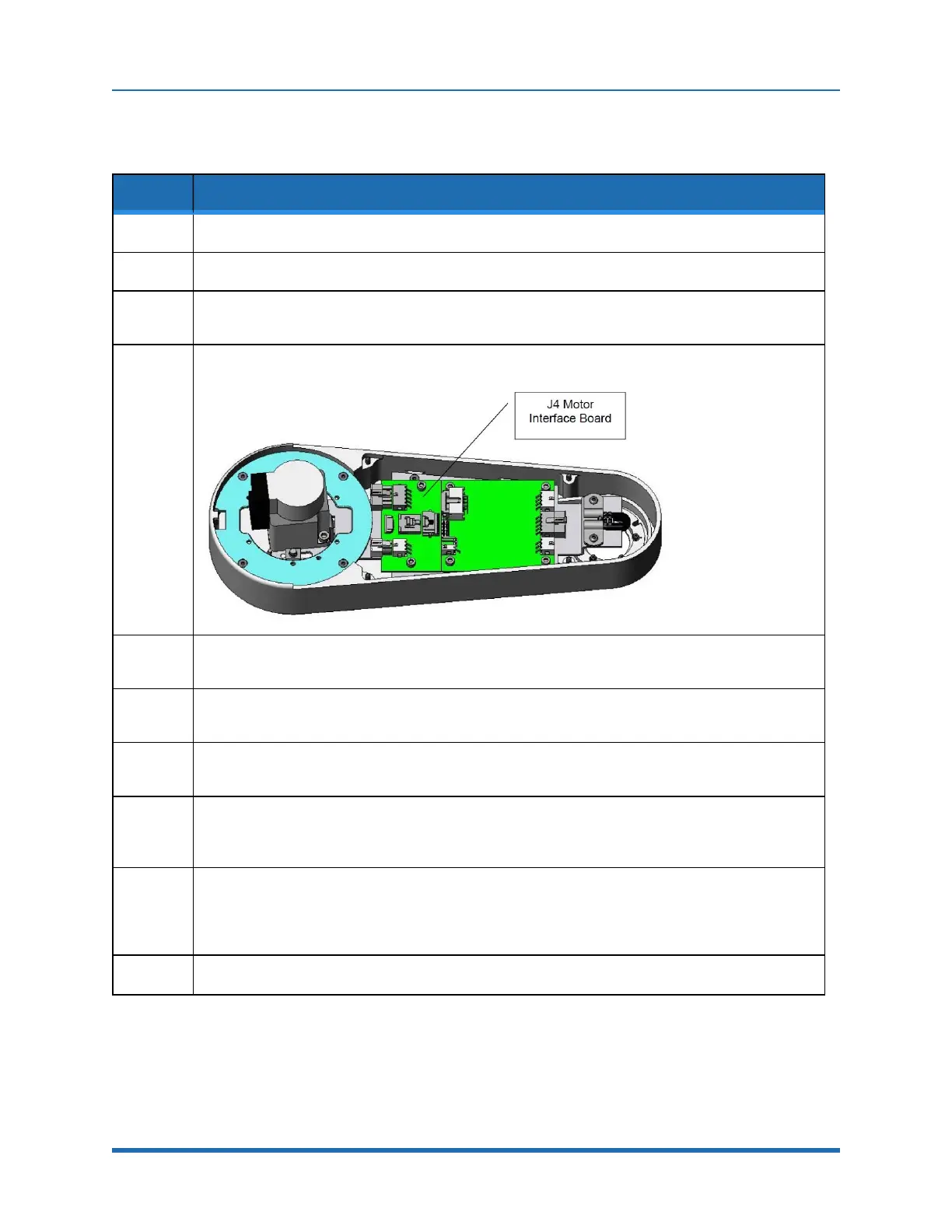
4.
Release the J4 Motor Interface circuit board by removing the (2) M3 X 10 mm SHCS.
5.
Disconnect the Outer Link Harness from the J4 Motor Interface PCA and the Guidance 1100C Slave
Controller in the Outer Link.
6.
Remove the upper circuit board in the Robot Controller by removing the (4) M2.5 X 6 mm screws and
disconnect the harness.
7.
Remove the Harness Retaining Clip from the Robot Controller Mount Plate to release the controller
end of the harness.
8.
Remove the (4) M2.5 X 16 mm standoffs attaching the lower circuit board in the Robot Controller.
Gently tip the lower circuit board upwards and disconnect the motor and encoder cables from the
lower circuit board.
9.
Release the Harness Retaining Clip from the J3 Output Pulley by loosening the M3 X 25 mm SHCS
attaching the clip to the pulley.
Pull the clip upwards and remove the M3 X 4 mm BHCS that clamps the harness to release the
harness from the clip.
10.
Replicate the folds on the controller end of the replacement harness.
131
Copyright © 2023, Brooks Automation