5. Hardware Reference (Undefined variable: MyVariables.ProductName)
System Schematics Part Number: PF40-DI-00010 Rev. A
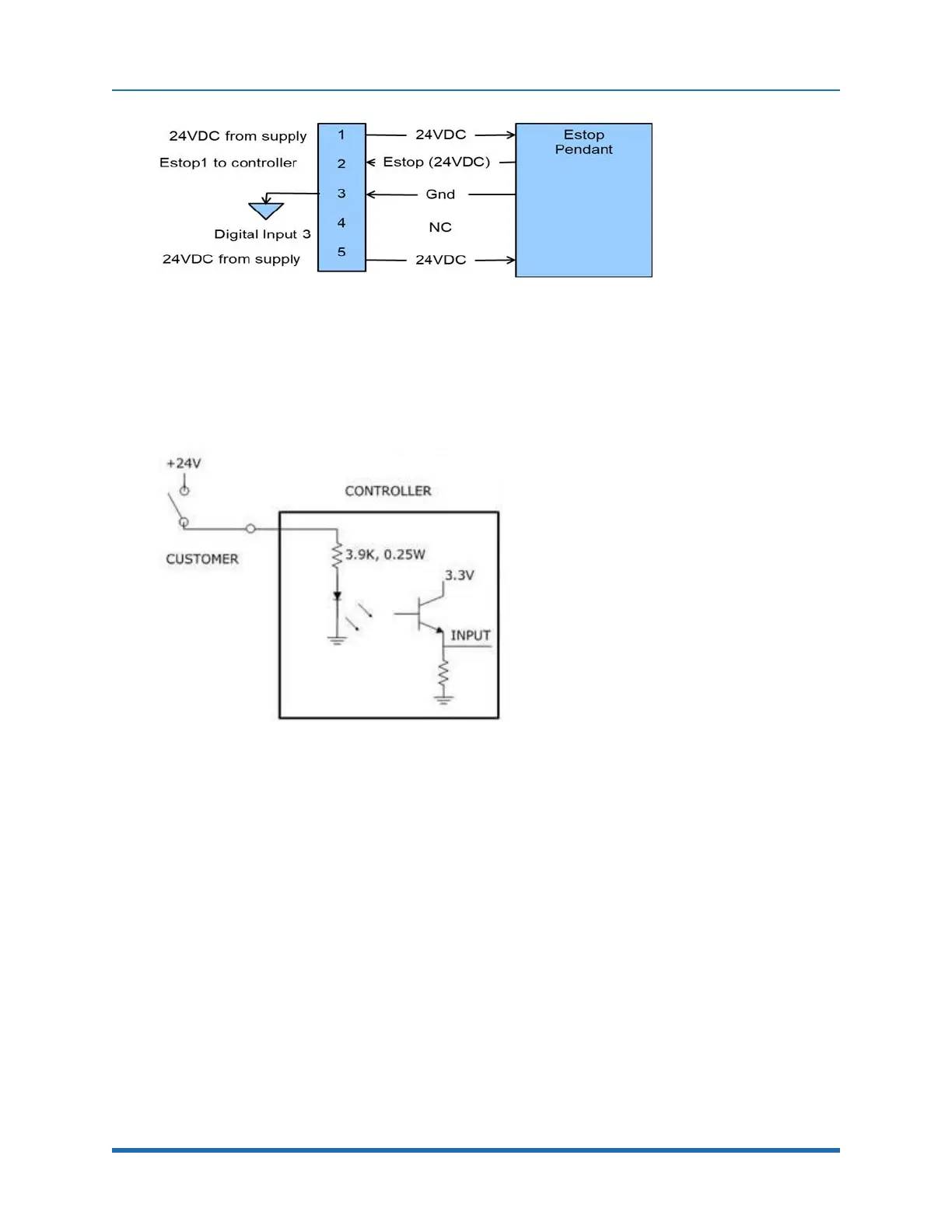
Figure 5-22: E-Stop Pins on the MCP Interface
This input signal can be configured as "sinking" (Figure 5-23) or "sourcing" (Figure 5-24). If an input
signal is configured as "sinking," the external equipment must pull its input high to 5 VDC to 24 VDC
to indicate a logical high value or must allow it to float to no voltage for a logical low. This input is
configured at the factory as “sinking”.
Figure 5-23: Sinking Digital Input
69
Copyright © 2023, Brooks Automation