Brooks Automation 5. Hardware Reference
Part Number: PF40-DI-00010 Rev. A System Schematics
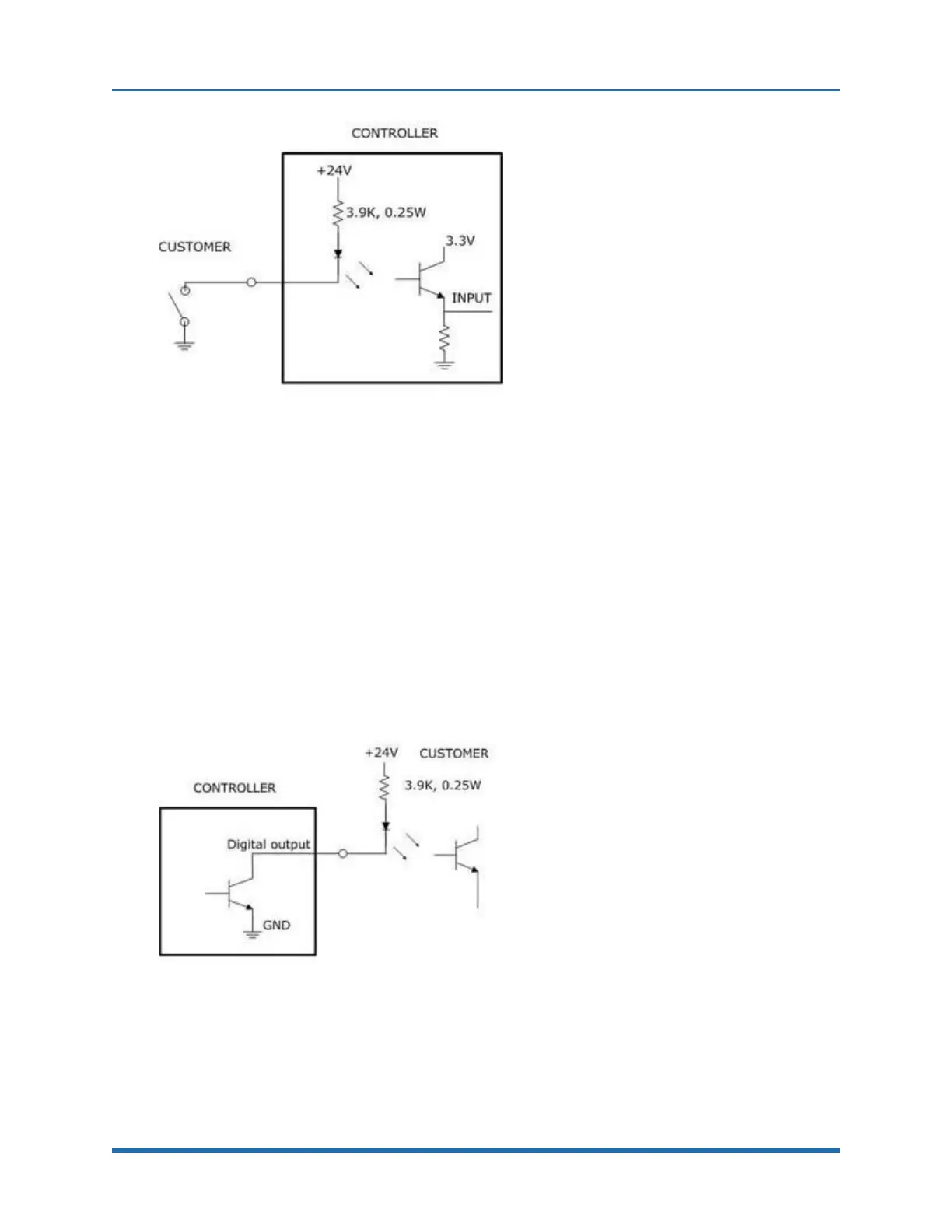
Figure 5-24: Sourcing Digital Input
By setting Jumpers on the CPU (MIDS4) board, the four output signals can be individually
configured as "sinking" or "sourcing" and the four digital inputs can be configured as a group to all
operate as either sinking or sourcing. For more information on configuring the jumpers, see the
Guidance 1000A/B Controllers, Hardware Introduction and Reference Manual.
Digital Output Signals
The PreciseFlex robot provides four general-purpose optically isolated digital output signals at the
G1400B controller. These output signals can be configured as "sinking" (Figure 5-25) or "sourcing"
(Figure 5-26). As shipped from the factory, the output signals are configured as "sinking," i.e. the
external equipment must provide a 5 VDC to 24 VDC pull up voltage on an output pin and the
controller pulls this pin to ground when the signal is asserted as true.
Figure 5-25: Sinking Digital Output
Alternately, the output signals can be configured as "sourcing," i.e. the external equipment must pull
down an output pin to ground, and the controller pulls this pin to 24 VDC when the signal is asserted
as true.
Copyright © 2023, Brooks Automation
70