Page 93 of 112
DMM-0200 Product User Guide
159 Swanson Road
Boxborough, MA 01719
Tel: 508-475-3400
Email: sales@dovermotion.com
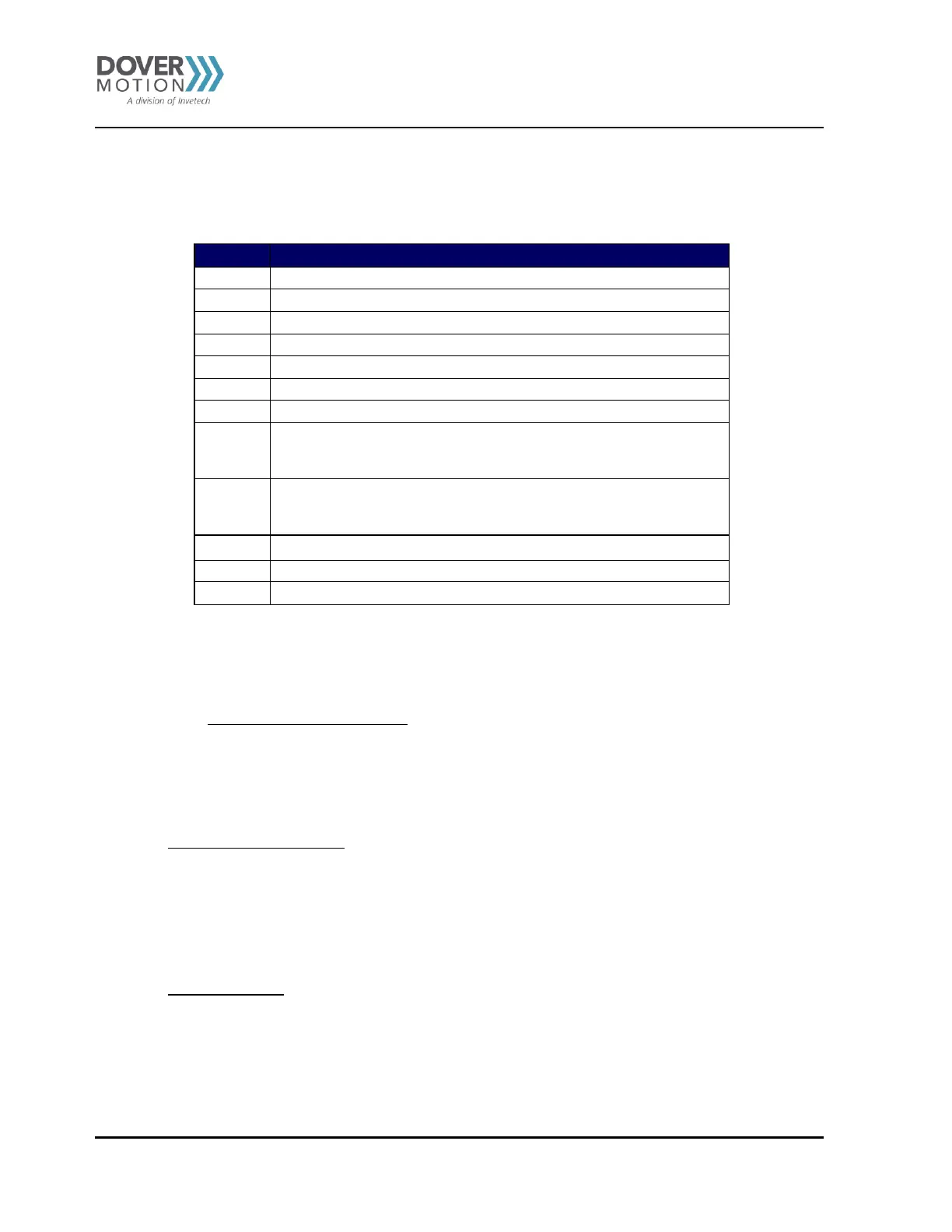
Motor Status
Motor status can be read anytime using MSTX/MSTY command. Value of the motor status is replied as an
integer with following bit assignment:
Motor running at constant speed
Plus limit input switch status
Minus limit input switch status
Plus limit error. This bit is latched when plus limit is hit during motion. This
error must be cleared using the CLR/CLRX/CLRY command before
issuing any subsequent move commands.
Minus limit error. This bit is latched when minus limit is hit during motion.
This error must be cleared using the CLR/CLRX/CLRY command before
issuing any subsequent move commands.
Joystick Control On status
Table 22 Motor Status
Individual/Linear Interpolation Moves
For individual axis control use X and Y command followed by the target position
value. Individual/Linear Move Examples:
[X1000]: MoveX-axistoposition1000.
[Y1000]: MoveY-axistoposition1000.
ForlinearinterpolationaxiscontrolusetheI[XTarget]:[YTarget]toperformcoordinatedmovementtothespecifiedtargetpositions
LinearInterpolationMoveExamples:
[I1000:1000]: MoveX-axistoposition1000,Y-axistoposition1000usinglinearinterpolation.
[I10000:-10000]: MoveX-axistoposition10000,Y-axistoposition-10000usinglinearinterpolation.
Individual/LinearInterpolationmovescanbeperformedintwomodes:incrementalmode.Tosetmovemodes,usetheINCandABS
commandsrespectively.
MoveModeExamples:
[X1000]–INCmode: Themotorwillmoveby1000fromthecurrentposition.
[X1000]–ABSmode: Themotorwillmovetoabsoluteposition1000.