11.5 Decoding system status words
When using the serial communic
aons link, addional informaon that may be useful
for fault nding is available to be accessed. When sending a query to monitor measured
motor speed, the pump also returns a System Status Word.
The send command is as follows:
Command
? v 8 5 2 cr
The reply will be as follows, where the rst returned number refers to motor rotaonal
speed in revoluons per second (Hz) and the second part is the system status word::
Reply
= v 8 5 2 sp d d d d ; h h h h h h h h cr
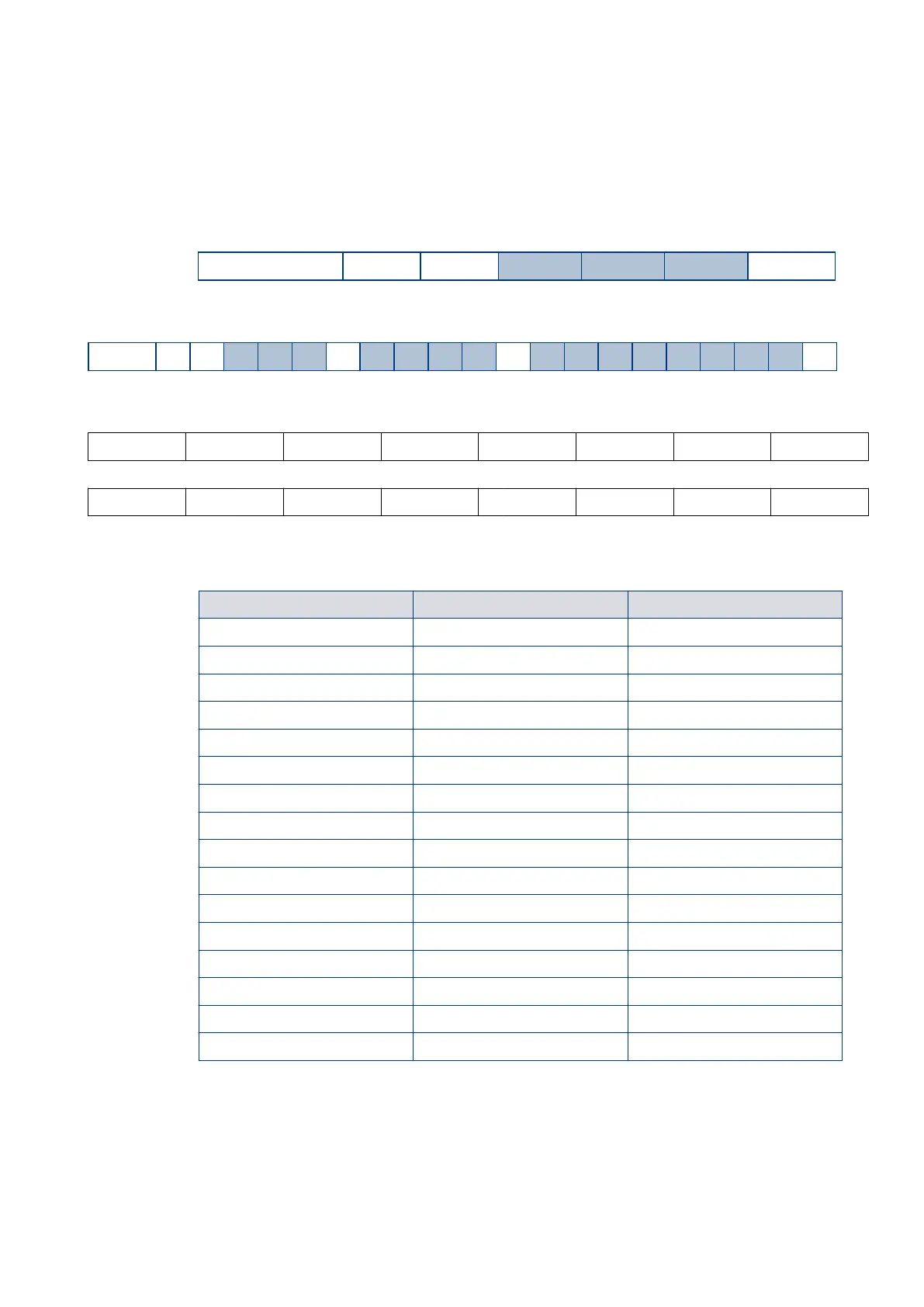
The System Status Word returned is made up of 8 hexadecimal digits. To decode this
word, convert each digit into a 4‑digit binary number. Follow the example below:
2 2 8 3 0 0 2 2
ê ê ê ê ê ê ê ê
0 0 1 0 0 0 1 0 1 0 0 0 0 0 1 1 0 0 0 0 0 0 0 0 0 0 1 0 0 0 1 0
is provided as an aid.
Table 30
Hexadecimal conversion table
Hexadecimal Binary Decimal
0 0000 0
1 0001 1
2 0010 2
3 0011 3
4 0100 4
5 0101 5
6 0110 6
7 0111 7
8 1000 8
9 1001 9
A 1010 10
B 1011 11
C 1100 12
D 1101 13
E 1110 14
F 1111 15
Each binary digit (bit) represents a ag that is either
acve (state 1) or
not acve (state 0). To help decode the System Status Word, each bit is numbered
(starng with 0 for the least signicant to 31 for the most signicant) as shown below.
contains a list of the lower 16 status ags that will be useful for fault nding. The upper
16 status ags are reserved by us.
08/2021 - ©Edwards Limited
Page 102B8J200880_D
300812671_002_C3
B8J200880_D - Fault nding