connected to the pump via the nEXT pump power supply cable when accelerang and
running.
Whils
t decelerang the pump will coast down and no power will be returned to the
electrical supply.
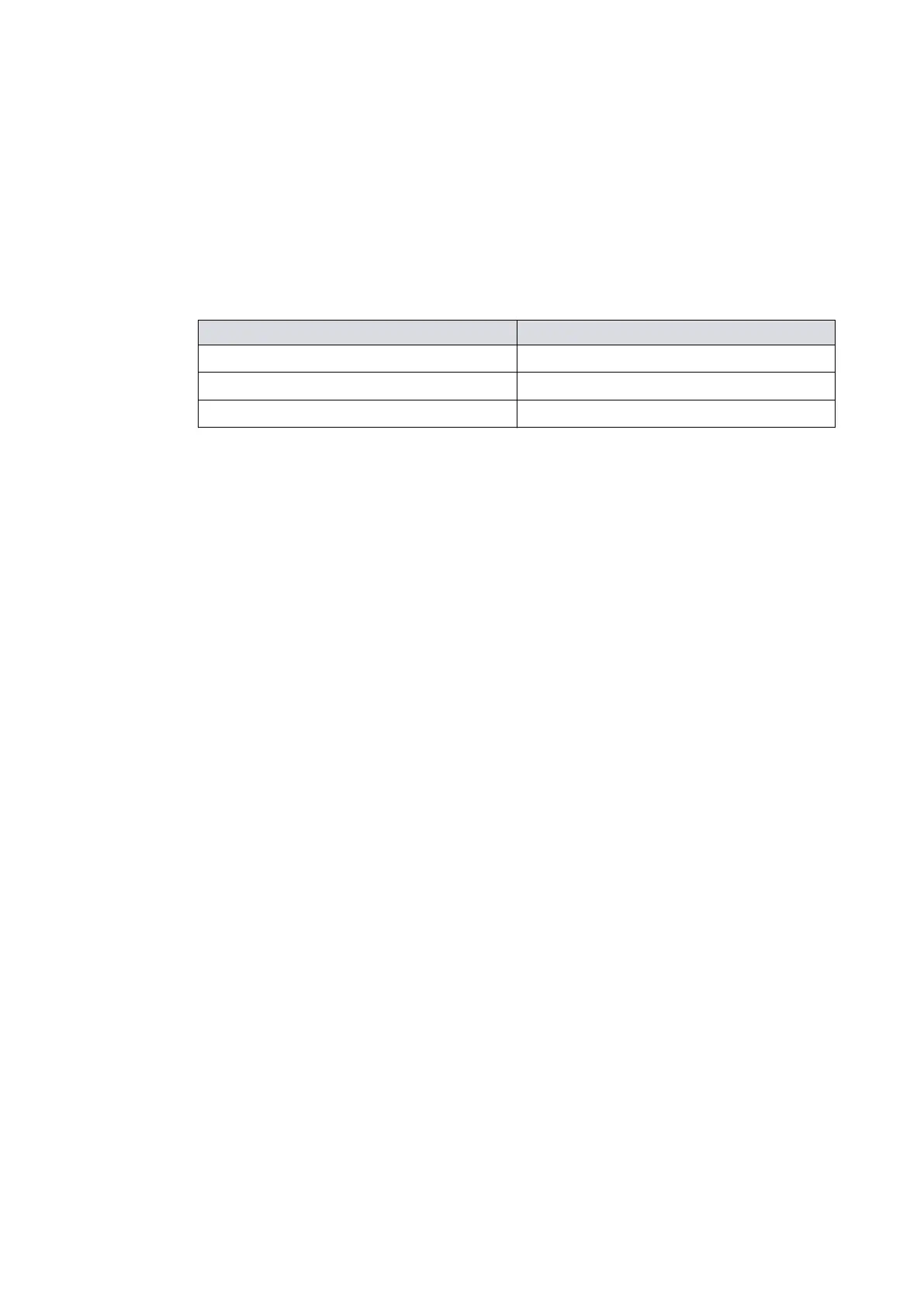
The electronic braking opon may be enabled to reduce the pump deceleraon me
and to recover some energy from the pump. This is only achieved by returning power
from the pump to the electrical supply through the nEXT pump power supply cable. The
rate at which electrical energy is returned to the supply is regulated to the voltages
shown:
Voltage range Returned electronic braking voltage
Below 43.2V dc. (48V dc. –10%) Outside working range for pump
43.2V dc. to 50.4V dc. 48 V d.c. + 10%
Above 50.4V dc. (48V dc. +5%) Outside working range for pump
In order to achieve the fastest electronic braking mes there must be somewhere for the
returned power to go, such as:
▪ A supply capable of receiving the returned power
▪ Other devices sharing the same electrical supply bus with the pump
▪ A suitable 3 A load when decelerang the pump
3.3.8 Bearing monitoring
In order to ensure maximum reliability and bearing life the nEXT pumps have an
integrated system to manage the bearing condion, refer to Bearing monitoring and
condioning system on page 106. The pumps have an integrated baery backed real
me clock that is constantly monitoring pump storage me.
If the pump is stored without being run for more than 12 months "Bearing Run in Mode
on page 107" (BRIM) is triggered the next me the pump is started to condion the
bearing. Bearing run in mode (BRIM) is a start-up sequence for the pump designed to
precondion the bearing to opmise bearing life. The pump goes through a number of
speed steps before reaching full speed.
3.4 Logic interface
The motor controller can only be operated through the logic interface. There are three
types of signals on the logic interface.
▪ Control inputs: these are switch‑type signals that ar
e used to control the pump
▪ Status outputs: these outputs idenfy the status of the system
▪ Analogue output: this provides a 0 ‑ 10 V output for a number of pump
par
ameters.
The logic interface has been designed to support both serial and parallel control and
monitoring, operang through one connector. For serial control either RS232 (default) or
RS485 can be selected using the RS485/CAN/RS232 slide switch located on the motor
controller (refer to Connecon for serial control and monitoring on page 59).
The logic interface can be plugged directly into the Edwards TIC Turbo Controller, TIC
Turbo Instrument Controller or TAG Controller and then use the funconality that they
08/2021 - ©Edwards Limited
Page 18B8J200880_D
300812671_002_C3
B8J200880_D - Overview