Exemple d’utilisa-
tion
Control
Roboter-
interface
in out
(11) (2) (1) (10) (4) (5)
(8)(7)
(12)
(3)(9)
(6)
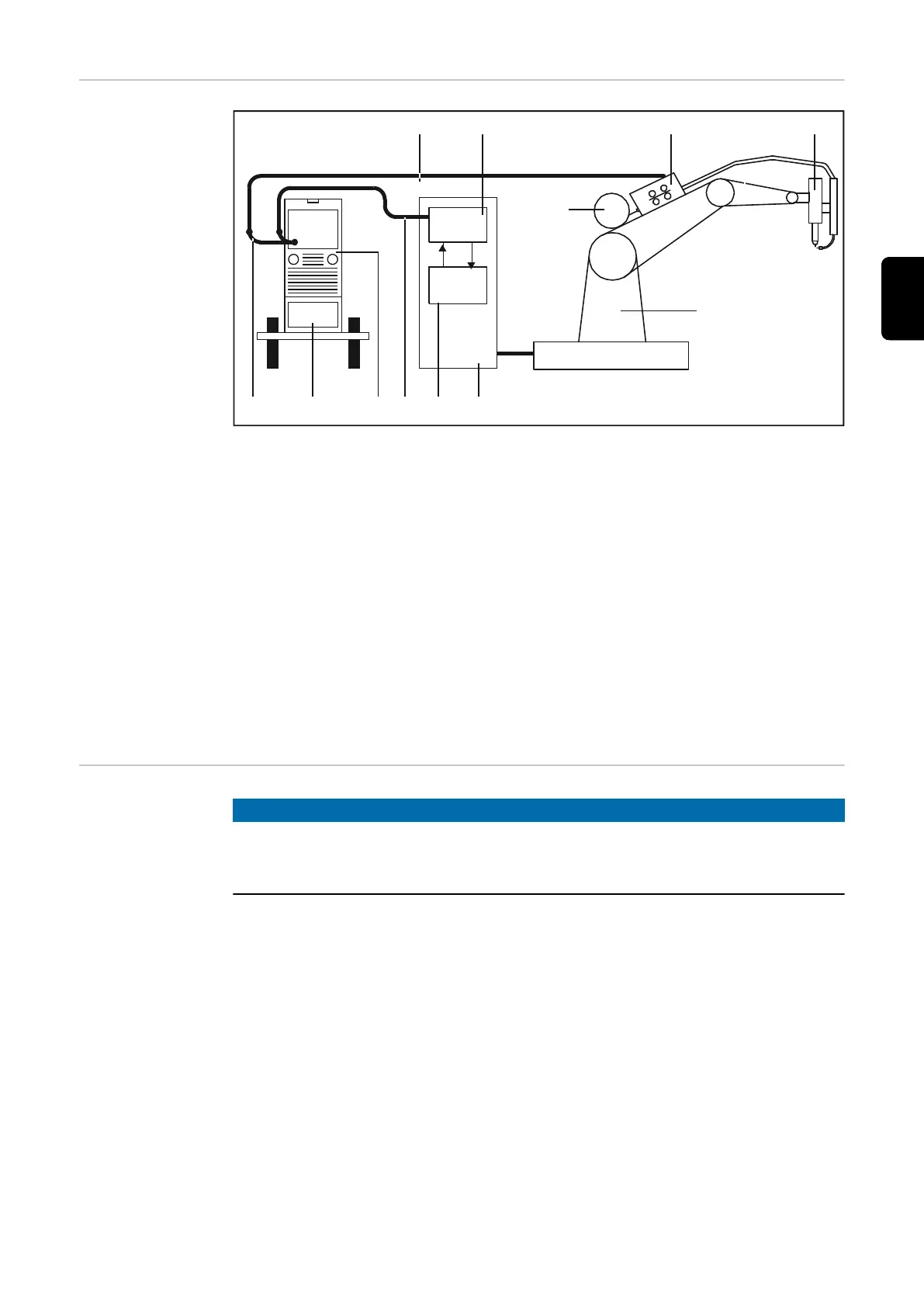
Exemple d’utilisation de l’interface robot ROB 4000 / 5000
(1) Source de courant
(2) Refroidisseur
(3) Interface robot
(4) Commande robot
(5) Armoire de commande de la commande robot
(6) Robot
(7) Entraînement du fil
(8) Torche de soudage
(9) Faisceau de liaison
(10) Câble de raccordement LocalNet
(11) Répartiteur LocalNet passif (pas en combinaison avec JobMaster TIG)
(12) Bobine de fil
Consignes
supplémentaires
REMARQUE!
Aussi longtemps que l’interface robot est connectée au Local-Net, le mode de ser-
vice „Mode 2 temps“ reste automatiquement sélectionné (affichage : Mode de ser-
vice à 2 temps).
Vous trouverez des informations plus détaillées concernant les modes de service dans le
mode d’emploi de la source de courant.
79
FR
 Loading...
Loading...