ecification
*2
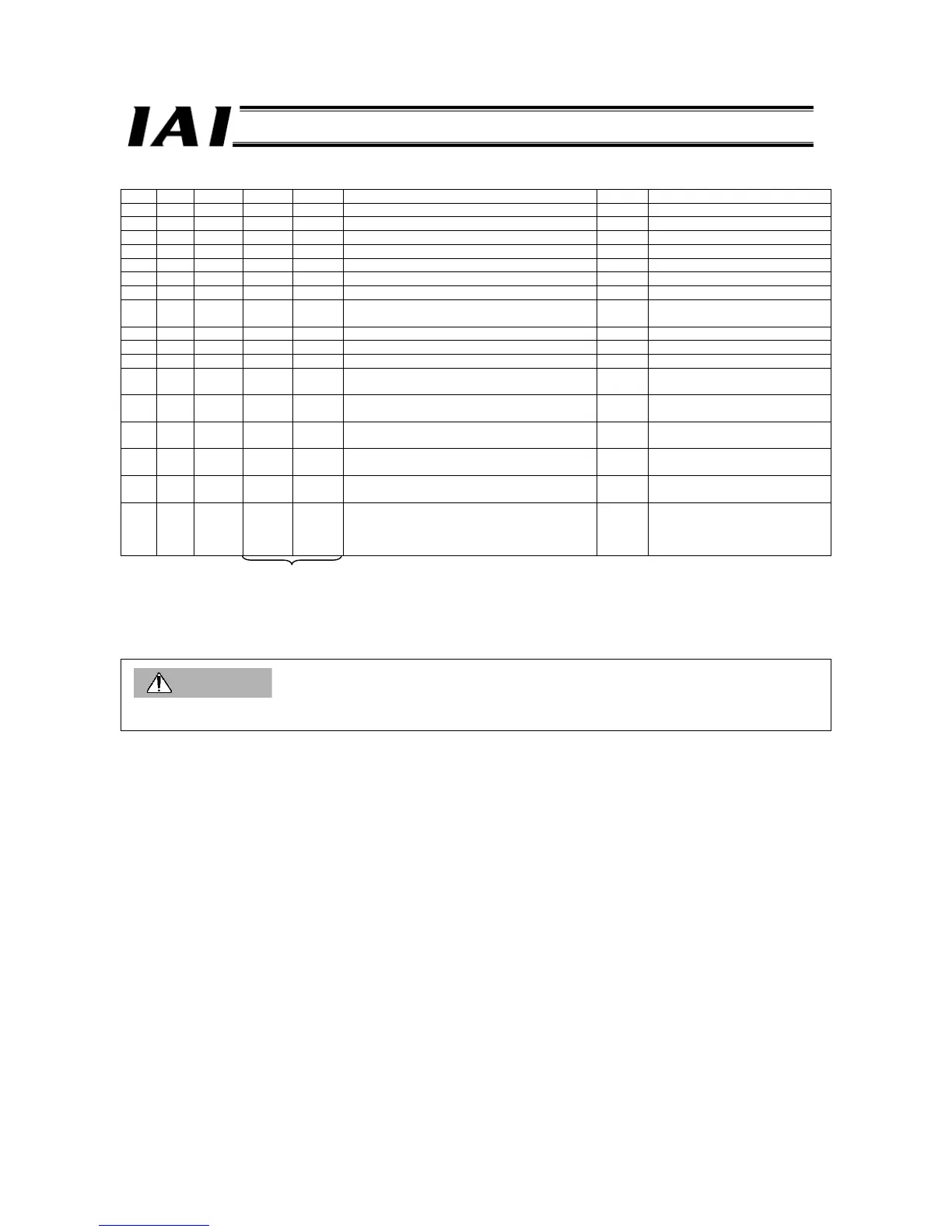
No. Type Symbol RPCON RACON Name Unit Factory default
43 b HMC
{ {
Home check sensor input polarity - (As specified at the time of order)
46 b OVRD
{ {
Speed override % 100
47 b IOV2
{ {
PIO jogging speed 2 mm/sec 100
48 b IOID
{ {
PIO inching distance mm 0.1
49 b IOD2
{ {
PIO inching distance 2 mm 0.1
52 b HSTP1 X
{
Default acceleration/deceleration mode - 0 [Trapezoid]
53 b HSTP2
{
X Default stop mode - 0 [Complete stop]
54 d CLPF X
{
Current control band number -
Set individually in accordance with
the actuator characteristics.
55 b PLPF X
{
Position-command primary filter time constant msec 0
56 b SCRV X
{
S-motion ratio setting % 0
71 b PLFG X
{
Position feed-forward gain - 0
77 b LEAD
{ {
Ball screw lead mm
Set individually in accordance with
the actuator characteristics.
78 b ATYP
{ {
Axis operation type -
Set individually in accordance with
the actuator characteristics.
79 b ATYP
{ {
Rotational axis mode selection -
Set individually in accordance with
the actuator characteristics.
80 b ATYP
{ {
Rotational axis shortcut selection -
Set individually in accordance with
the actuator characteristics.
83 b ETYP
{ {
Use absolute unit [0: Do not use / 1: Use] -
Set individually in accordance with
the actuator characteristics.
91 B PSFC
{ {
Current-limiting value at standstill after missing
load in push operation
[0: Current-limiting value during movement / 1:
Push-current limiting value]
-
0: Current-limiting value during
movement
*1
*1
{: Available X: Not available
*2 The parameter numbers are displayed in the PC software, but not on the teaching pendant. Missing numbers are not used
and are thereby omitted. Types are indicated solely for the purpose of convenience and are not displayed.
Caution
If you have changed any parameter, be sure to restart the controller via a software reset or reconnect the controller power.

 Loading...
Loading...




