ecification
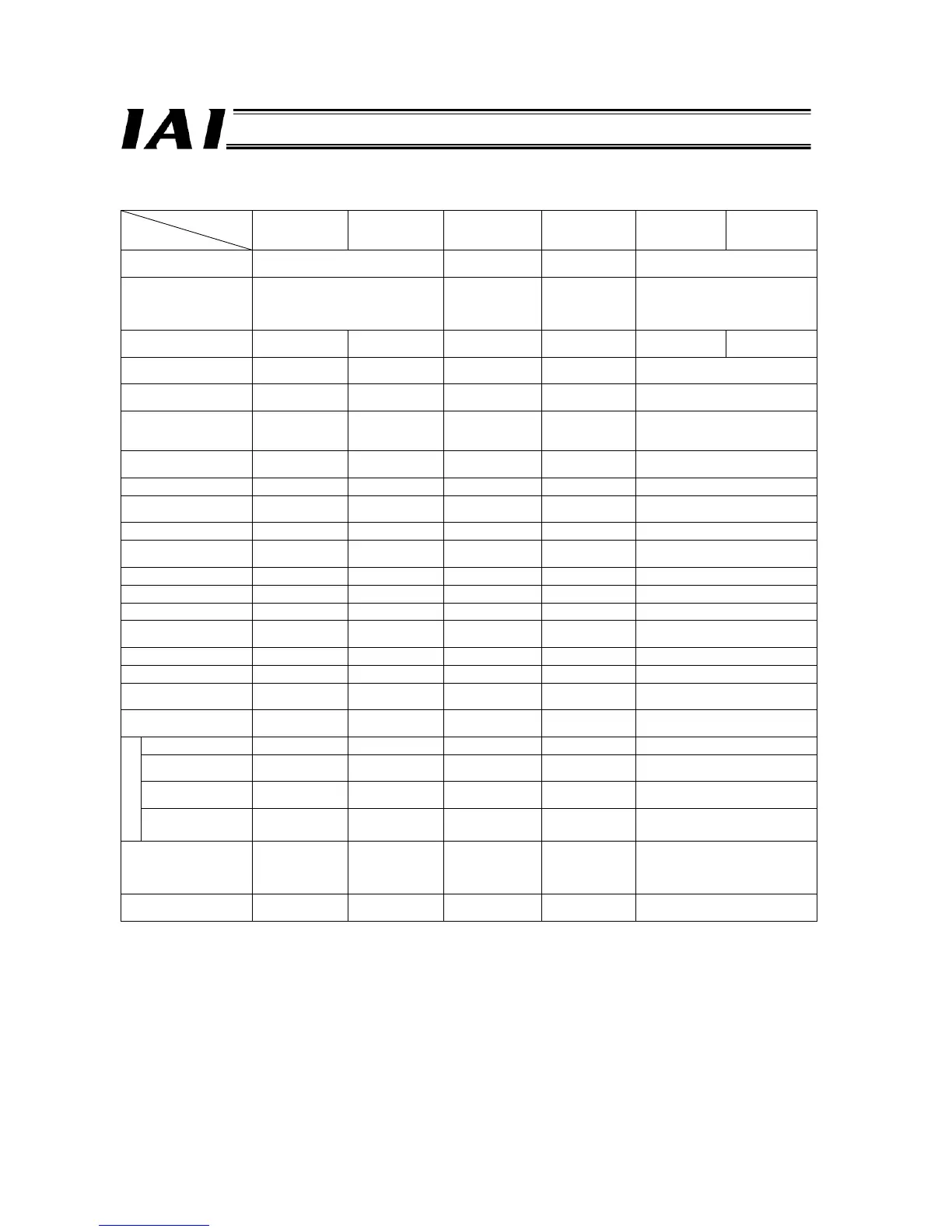
List of ROBONET Operation Functions
Operation mode
Item
Positioner 1
mode
Simple direct
mode
Direct numerical
specification
mode
Positioner 2
mode
Solenoid valve
mode 1
Solenoid valve
mode 2
Axis area
(Both input and output)
4 words 8 words 2 words 2 words
Fixed area
(Both input and output)
8 words
(The command area can be used.)
8 words
(The command
area cannot be
used.)
8 words
(The command
area can be
used.)
8 words
(The command area can be used.)
Number of registrable
positions
768 points/axis 768 points/axis - 768 points/axis 7 points/axis 3 points/axis
Operation by position
number specification
{ {
X
{ {
Direct position data
specification
X (Position table)
{ {
X (Position table) X (Position table)
Direct speed &
acceleration/deceleratio
n specification
X (Position table) X (Position table) { *3 X (Position table) X (Position table)
Direct positioning band
specification
X (Position table) X (Position table)
{
X (Position table) X (Position table)
Push operation { (Position table) { (Position table)
{
(Direct specification)
{ (Position table) { (Position table)
Completed position
number monitor
{ {
X
{ {
Zone output monitor
{ { { { {
Position zone output
monitor
{ {
X
{ {
Teaching operation
{
X X
{
X
Jogging operation
{ { { {
X
Inching operation
{ { { {
X
Various status signal
monitor *1
{ { { {
X
Current position monitor
*1
{ { { {
X
Alarm code monitor *1
{ { { {
X
Speed/electrical current
monitor *1
X X
{
X X
Axis monitor function in
AUTO mode *2
{ { { { {
Handshake
{ {
X
{ {
Position table data
read/write
{ {
X
{ {
Current position
read
X X X X X
Command
Broadcast
{
X X
{ {
Maximum specifiable
position data value
9999.99 mm
(When a
command
is used)
9999.99 mm 9999.99 mm
9999.99 mm
(When a
command
is used)
9999.99 mm
(When a command is used)
Number of connectable
axes
16 16 8 16 16
*1 Various status signals, current position, alarm codes and speed/electrical current can be monitored by accessing each
address of the gateway unit from the PLC.
*2 Before, axis monitor was not possible in the AUTO mode. This has become possible with the ROBONET, even when the
MODE switch is set to AUTO, by connecting a dedicated touch panel to the TP connector.
*3 Separate values cannot be set for acceleration and deceleration. The acceleration and deceleration are always the same.

 Loading...
Loading...




