353
Part 3 Maintenance
Code Alarm name Cause/action
0A2 Position data
error
Cause: [1] A movement command was input when a target position was not set in the
“Position” field.
[2] The target position in the “Position” field exceeds the specified soft limits.
Action: [1] Set a target position first.
[2] Change the target position to a value within the specified soft limits.
0A3 Position
command data
error
Cause: The speed or acceleration/deceleration in the numerical command exceeds the
maximum setting.
Action: Change the speed or acceleration/deceleration to an appropriate value.
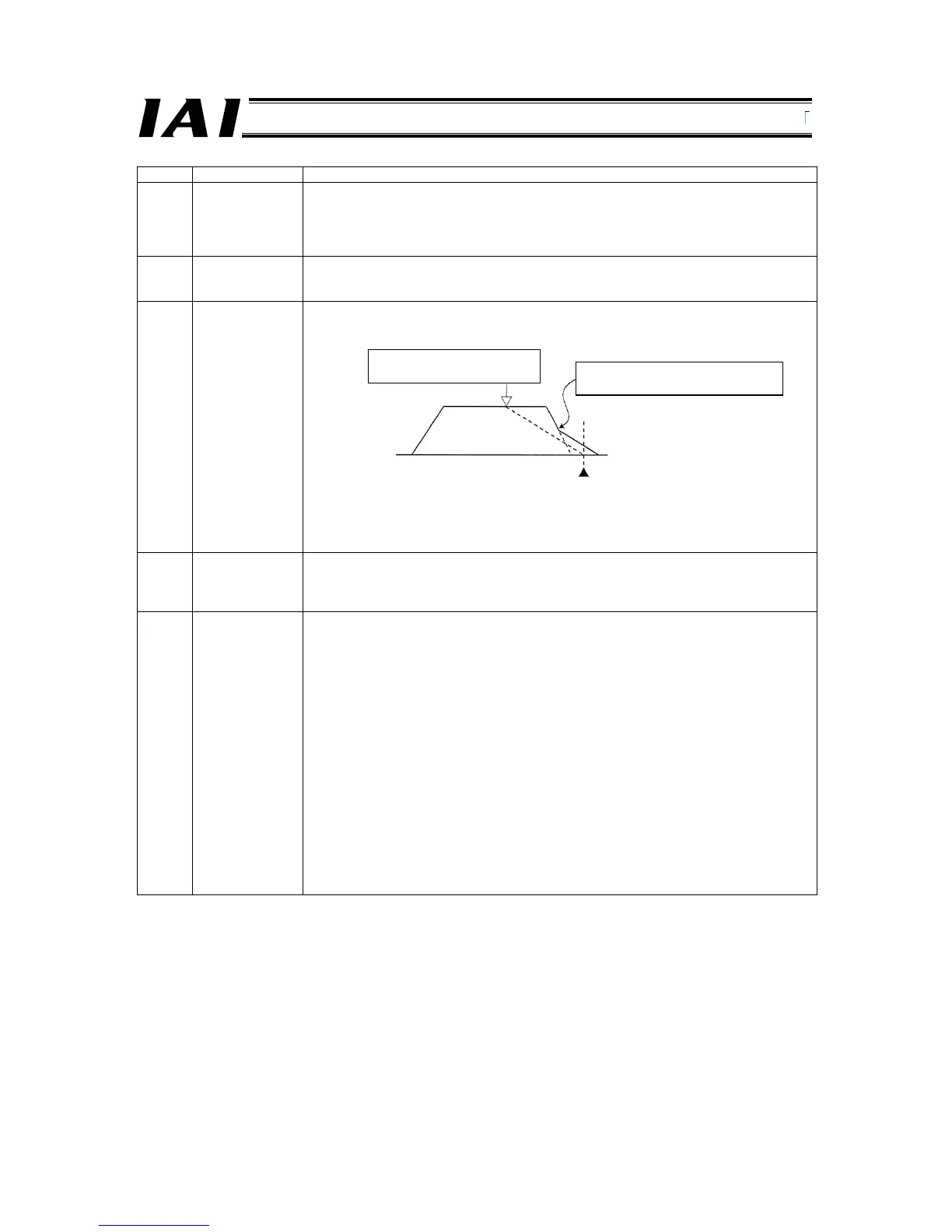
0A7 Command
deceleration error
When the target position is near a soft limit and the deceleration is set low, issuing a
command with the applicable position number while the actuator is moving may cause the
actuator to exceed the soft limit.
Cause: The next movement command was not issued quick enough after a speed
change implemented while the actuator was moving.
Action: Change the speed quickly so that the actuator will not overshoot by exceeding
the soft limit.
0B5 Z-Phase Position
Error
The position where the Z-phase is detected before the home return operation is out of the
specified range, or Z-phase is not detected.
Cause: Encoder Error
Action: Contact our company
0B6 Phase-Z
detection timeout
(RACON only)
This controller performs magnetic-pole phase detection (pole sensing) when the servo is
turned on for the first time after the power ON. This alarm indicates that the encoder
phase-Z signal could not be recognized within the specified time.
• When the detail code is H’0001:
Pole sensing operation + Magnetic pole check
• When the detail code is H’0002:
Operation after reversing upon push & hold action following a home return
Cause: [1] Loose or disconnected encoder-relay or motor-relay cable connector
[2] Brake cannot be released on an actuator equipped with brake.
[3] Large motor load due to application of external force
[4] Large slide resistance of the actuator itself
Action: [1] Check the wiring condition of the relay cables.
[2] Check the wiring condition of the brake cable. Also, turn on/off the brake
release switch and check if the brake makes “click” sounds.
[3] Check for abnormality in the assembly condition of mechanical parts.
[4] If the load is normal, cut off the power and move the actuator by hand to
check the slide resistance.
If the actuator itself is suspected, such as when a faulty encoder is a likely
cause, please contact IAI.
Deceleration starting position not
resulting in soft limit overshoot
If a command is issued at this position,
the soft limit will be exceeded.
Soft limit

 Loading...
Loading...




