ecification
Position
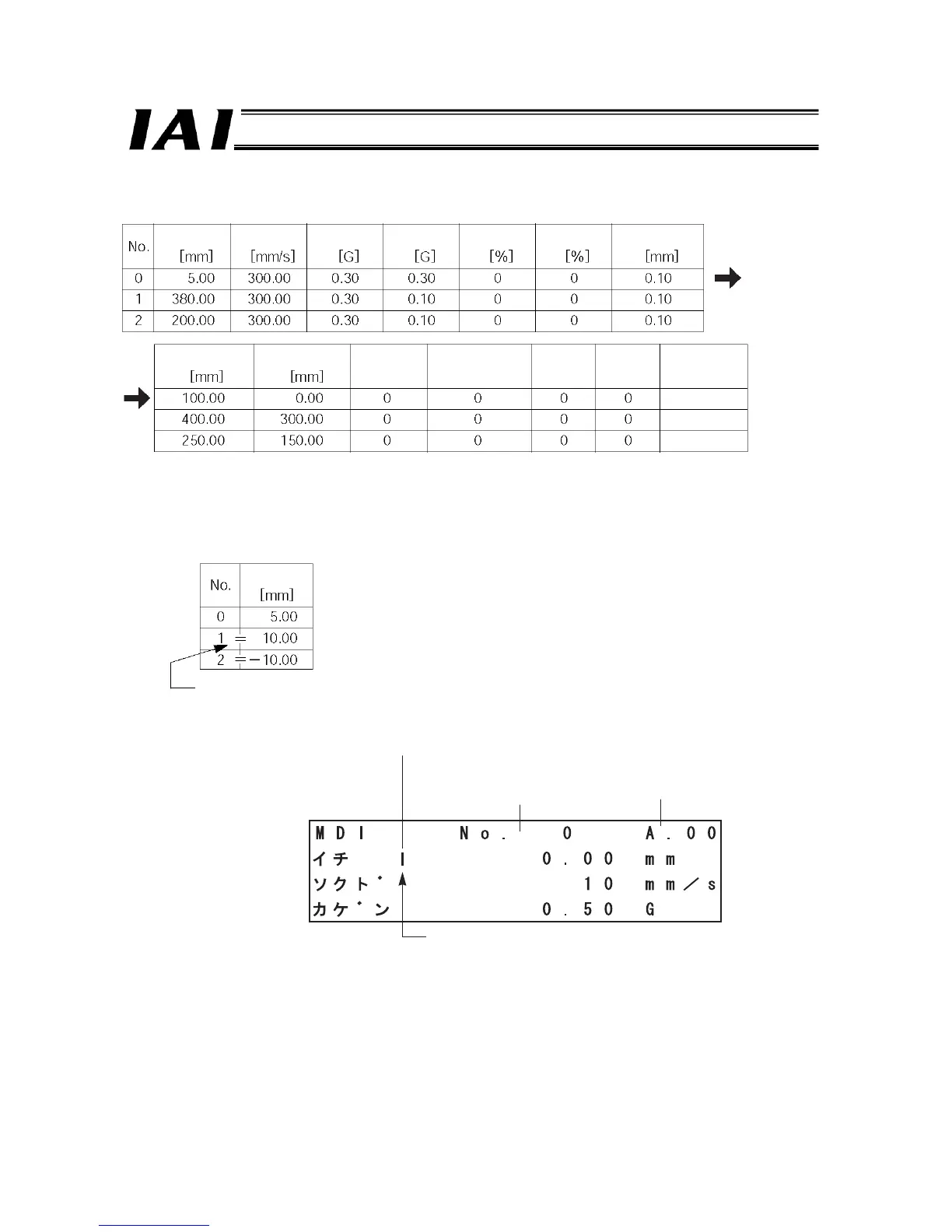
The position table is explained using the screen of the PC software as an example.
(The display is different on the teaching pendant.)
(1) No. • A position data number is indicated.
(2) Position • Input the target position to which to move the actuator [mm].
Absolute coordination specification: Input the distance from the actuator home.
Relative coordination specification: Constant pitch feed is assumed. The specified value
represents a relative distance from the current position.
Absolute coordination specification: The target position is 5 mm from the home.
Relative coordination specification: The target position is 10 mm plus the current position.
Relative coordination specification: The target position is 10 mm minus the current position.
* On the teaching pendant (RCM-T), this sign indicates that the position is specified in relative coordinates.
(3) Speed • Input the speed at which to move the actuator [mm/sec].
The default varies according to the actuator type.
Position Speed Acceleration Deceleration Push Threshold
Positioning band
Zone+ Zone-
Acceleration
/deceleration
mode
Incremental
Command
mode
Stop
mode
Comment
: Absolute coordination specification (ABS)
I : Indicates the relative coordination specification (INC)
Position number
Axis number
being edited
On the teaching pendant (CON-T),
this sign indicates that the position is
specified in relative coordinates.

 Loading...
Loading...




