USER MANUAL
INTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 124
When the Intel® Falcon™ 8+ UAV detects a low GPS quality, it automatically activates
Height-Mode and gives the respective GPS lost warning (see “GPS Warning” on
page 155). Nevertheless, it is strongly recommended to actively switch to Height-Mode
on the CTR beforehand, because it is unpredictable when the system will switch
between flight modes. Additionally, the system might only switch to Height-Mode
when the positional accuracy is already low for the current flight situation.
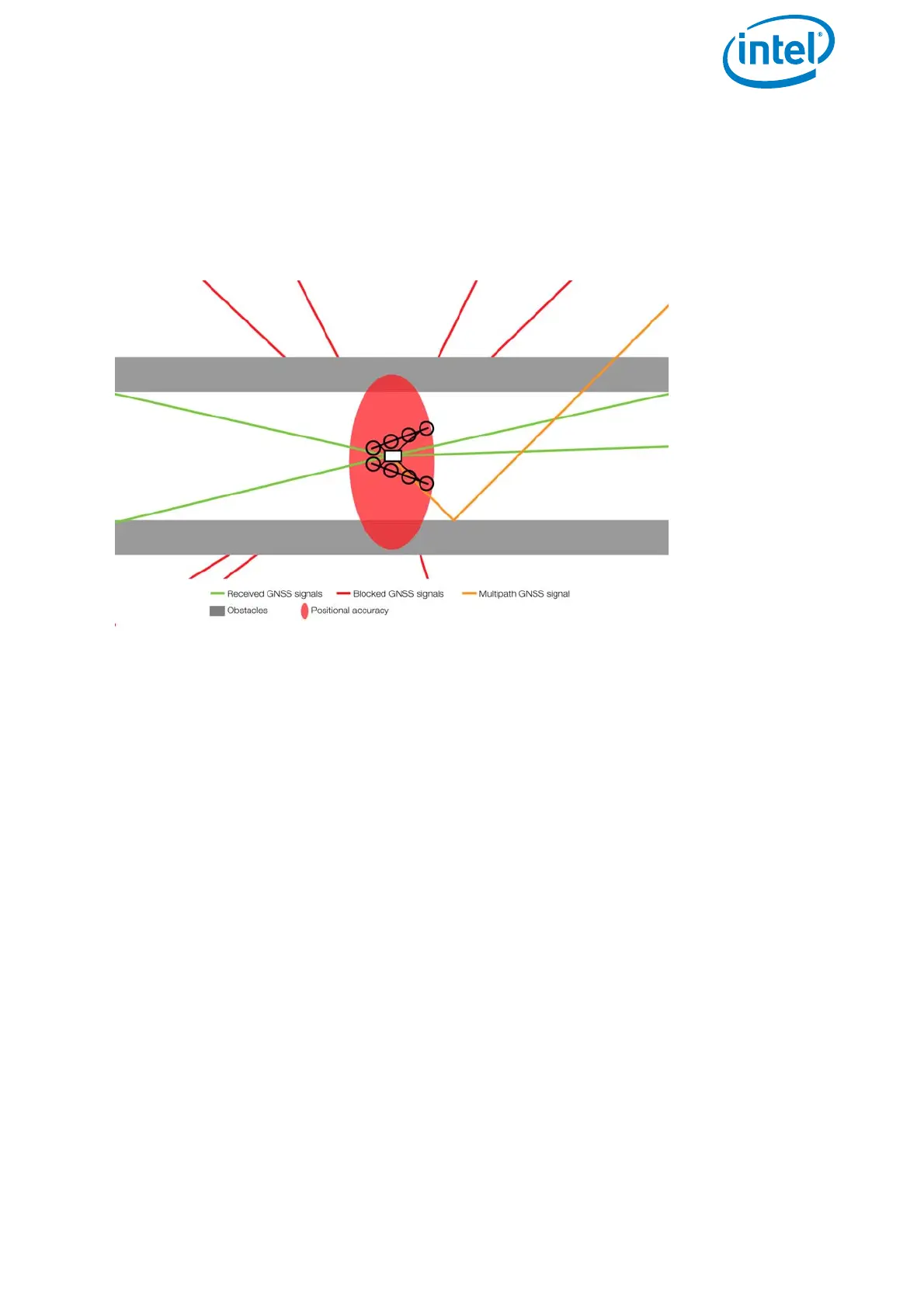
Figure 3.16: GPS Multi Path Effects
When the UAV is placed close to walls which can reflect the satellite signal, the GPS
receiver has no possibility of identifying if the signal comes from a reflection or directly
from a satellite. Therefore, there might be situations (often in narrow streets) where
reflections are interpreted incorrectly and full GPS reception is displayed, but the
actual position accuracy is very low. Therefore, the pilot needs to pay special attention
in such situations. Whenever there are potential shadings or reflections of the GPS
signal, it is recommended to not use the GPS-Mode.
Compass Error Estimation
In addition to the compass sensors of the Intel® Falcon™ 8+ UAS, the UAV is equipped
with a compass error estimation algorithm.
The compass error estimation uses, among others, GPS-data to estimate the heading
of the UAV. For this purpose, horizontal flight movements are necessary. The collected
data is used to compensate for potential external disturbances of the compass sensors.
Directly after launching it can take the compass error estimator up to 30 seconds to
work properly.
The compass error estimator is active only in GPS-Mode. It is not active in Height-Mode
and in Manual-Mode. Which means that in case of an external magnetic disturbance,
the heading of the UAV might be influenced, resulting in an un-commanded yaw
movement of the UAV, which must be compensated for by the pilot.