USER MANUAL
INTEL® FALCON™ 8+ UAS
© 2018 Intel Corporation. All rights reserved 118
Home Position
The home position is set automatically each time the motors are started.
Please note the following points:
• The flight path back to the home position may not be a straight line, but it may
be curved in windy conditions.
• When the UAV is flown in Height-Mode (an H is shown in the upper right corner
of the Status Display) or in Manual-Mode (an M is shown in the upper right corner
of the Status Display) and the Link Loss Procedure is activated, the UAV will
automatically switch to GPS-Mode (a G is shown in the upper right corner of the
Status display) if a GPS signal is available.
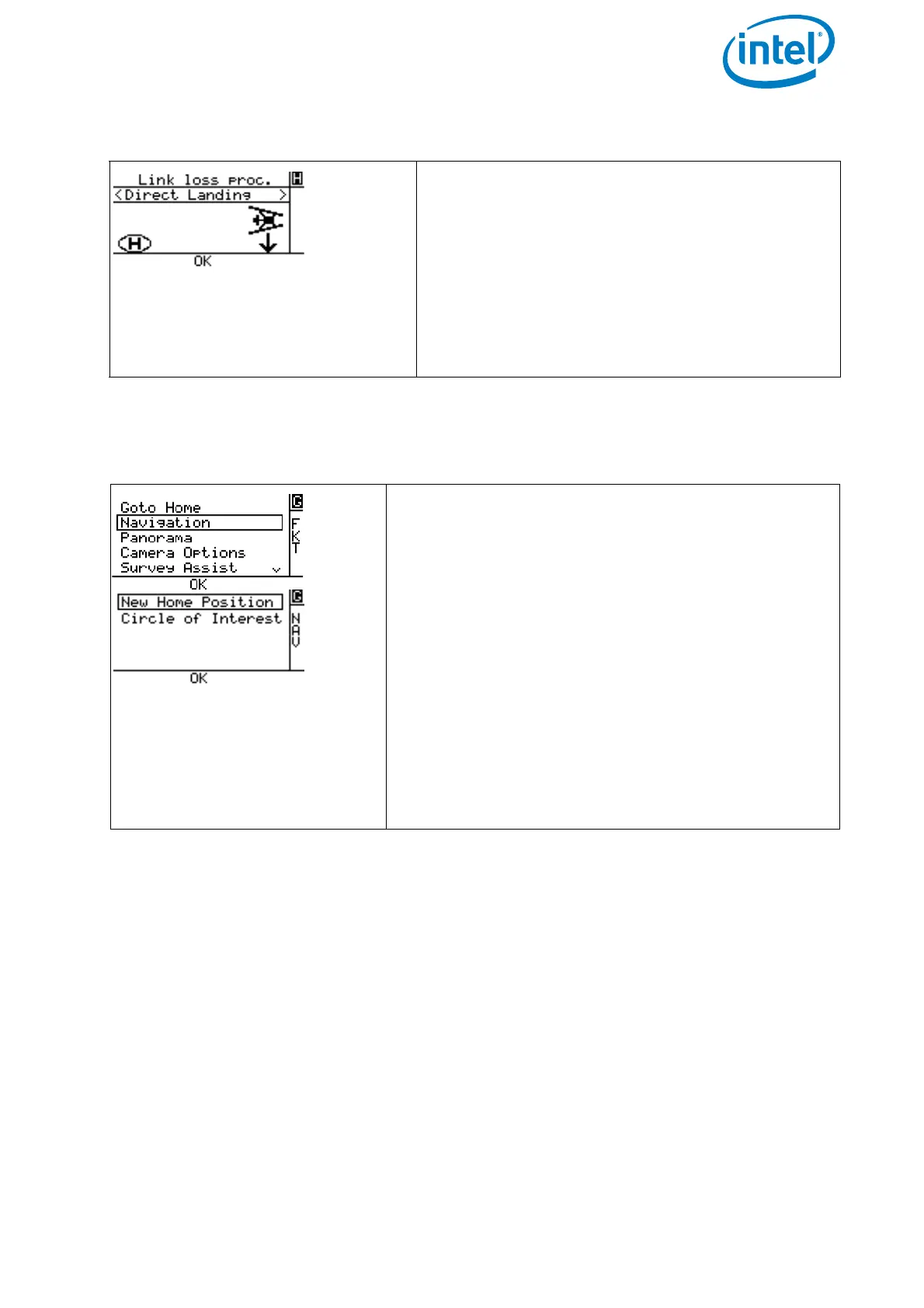
Figure 3.10: The Link Loss Procedures (Continued)
Direct Landing
In case the connection between CTR and UAV
gets lost, the UAV will stop and start a controlled
descend at 1.5 m/s at its current position until it
lands. If no GPS signal is available, the UAV will
always use Direct Landing.
Please note that in a situation without GPS sig-
nal, the UAV will drift with the wind while
descending.
Figure 3.11: New Home Position
It is possible to define a new home position while
the UAV is in the air.
To do so:
1. Push ENT at the Status Display.
You enter the shown menu.
2. Push the arrow RIGHT button one time to
highlight Navigation.
3. Push ENT.
You enter the shown menu.
New Home Position is highlighted.
4. Push ENT.
The new home position is set at the current location
of the UAV at the moment the ENT button is pushed
and you return to the Main Screen.