9. Commissioning
MiR100 Hook User Guide (en) 10/2020 - v.3.0 ©Copyright 2016-2020: Mobile Industrial Robots A/S. 112
Markers require the robot to do a docking sequence. When the robot is docking, it uses its
safety laser scanners to detect the marker and drives itself to the correct position relative to
the detected marker. The robot begins docking to a marker from the marker's entry
position—see Figure 9.12. The entry position is automatically created approximately one
meter in front of the marker and can be moved in the map editor.
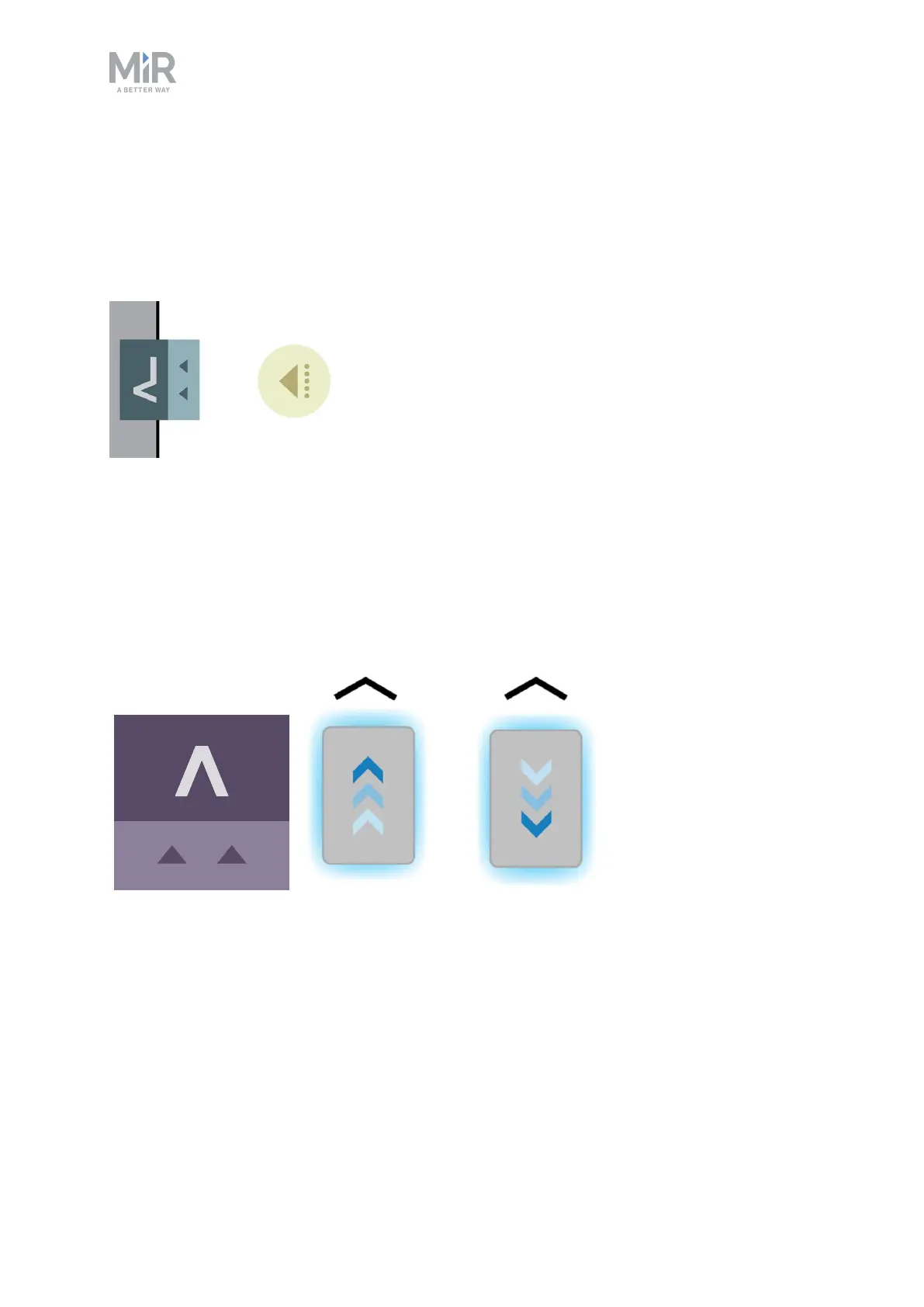
Figure 9.12. A VL-marker with its entry position.
There are four standard marker types that all MiR robots can use: V, VL, L, and Bar-markers.
A V-marker is a small, V-shaped marker that is designed for the robot to either dock to so its
front or its rear is facing the marker. The V-marker is the simplest marker available for the
robot. It consists of a V shape with and interior angle of 120° and sides of 150 mm.
Figure 9.13. The icon used for V-markers in the interface and an illustration of how robots can dock to the
marker.
A VL-marker is a larger marker that enables the robot to dock more accurately than V-
markers. It consists of a V-marker with a 350 mm plate attached to the right of the V shape.