18
Interrupt Functions Section 1-4
Error Detection and Error
Log Operation (DM 6655)
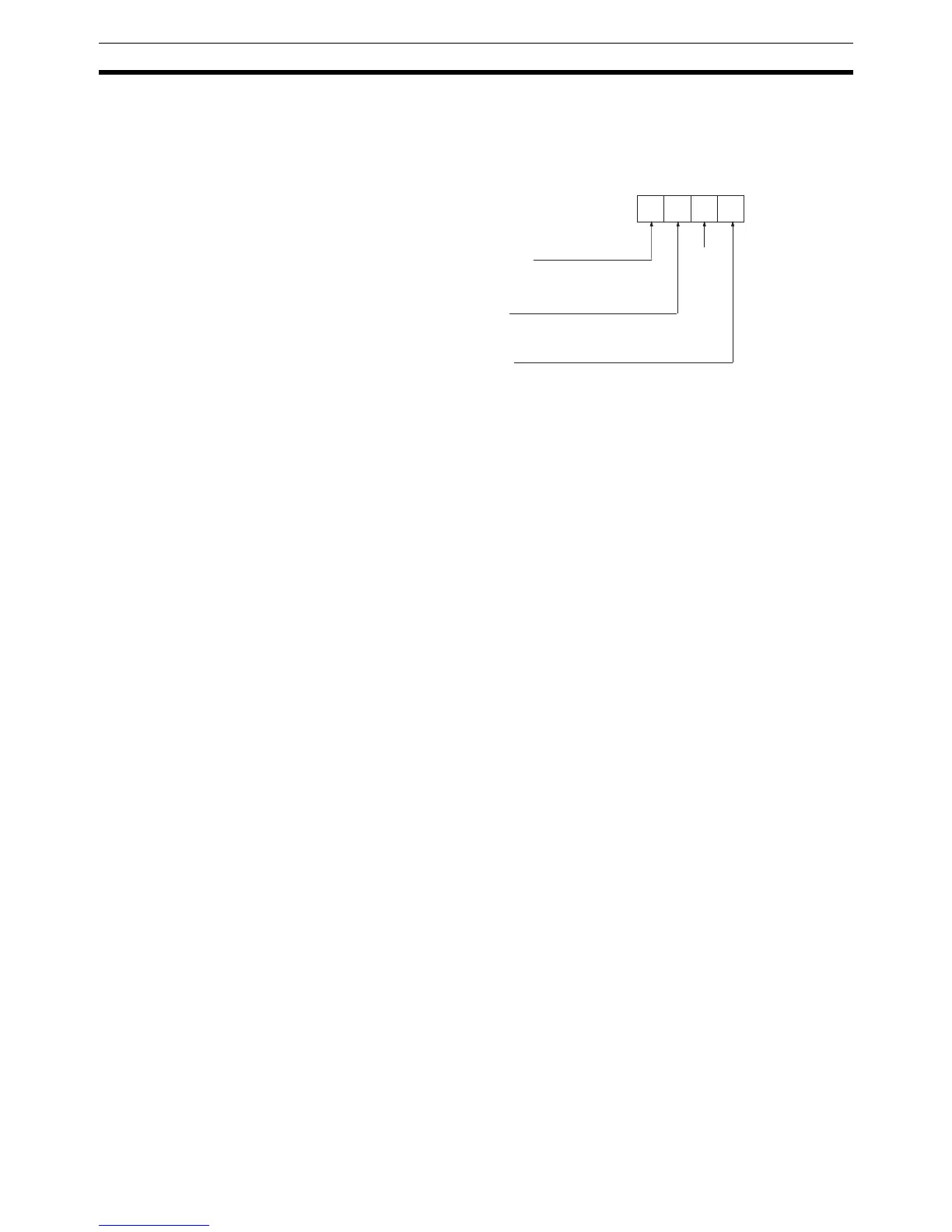
Make the settings shown below to determine whether or not a non-fatal error
is to be generated when the cycle time exceeds 100 ms or when the voltage
of the built-in battery drops, and to set the method for storing records in the
error log when errors occur.
Battery errors and cycle time overrun errors are non-fatal errors. For details
on the error log, refer to SECTION 8 Troubleshooting.
1-4 Interrupt Functions
This section explains the settings and methods for using the CQM1H interrupt
functions.
1-4-1 Types of Interrupts
The CQM1H has four types of interrupts, as outlined below.
Input Interrupts:
Interrupt processing is executed when an input from an external source to one
of CPU Unit bits IR 00000 to IR 00003 turns ON.
Interval Timer Interrupts:
Interrupt processing is executed by an interval timer with a precision of 0.1
ms.
High-speed Counter Interrupts:
Interrupt processing is executed according to the present value (PV) of the
built-in high-speed counter. CQM1H CPU Units are equipped with the follow-
ing 3 types of high-speed counter interrupts. All can function as target-value
interrupts or range-comparison interrupts. (A target-value interrupt is gener-
ated when the PV matches the SV, and a range-comparison interrupt is gen-
erated when the PV is within a preset SV range.)
1,2,3... 1. High-speed counter 0 (built into the CPU Unit)
High-speed counter 0 counts pulse inputs to CPU Unit inputs 4 to 6. Two-
phase pulses up to 2.5 kHz can be counted.
2. High-speed counters 1 and 2 (Pulse I/O Board)
High-speed counters 1 and 2 count high-speed pulse inputs to ports 1 and
2 on the Pulse I/O Board. Two-phase pulses up to 25 kHz can be counted.
3. Absolute high-speed counters 1 and 2 (Absolute Encoder Interface Board)
High-speed counters 1 and 2 count absolute rotary encoder codes input to
ports 1 and 2 on the Absolute Encoder Interface Board.
Low battery voltage detection
0: Detect
1: Don't detect
15 0
DM 6655
0
Bit
Always 0
Cycle time over detection
0: Detect
1: Don't detect
Error log storage method
0: Error records for 10 most recent errors always stored (older errors deleted).
1: Only first 10 error records stored (no errors stored beyond that point).
2 to F: Error records not stored.
Default: Low battery voltage and cycle time over errors detected, and error records
stored for the 10 most recent errors.