Examples and tips
PROGRAMMING MANUAL 230
Revision 3.0
/i
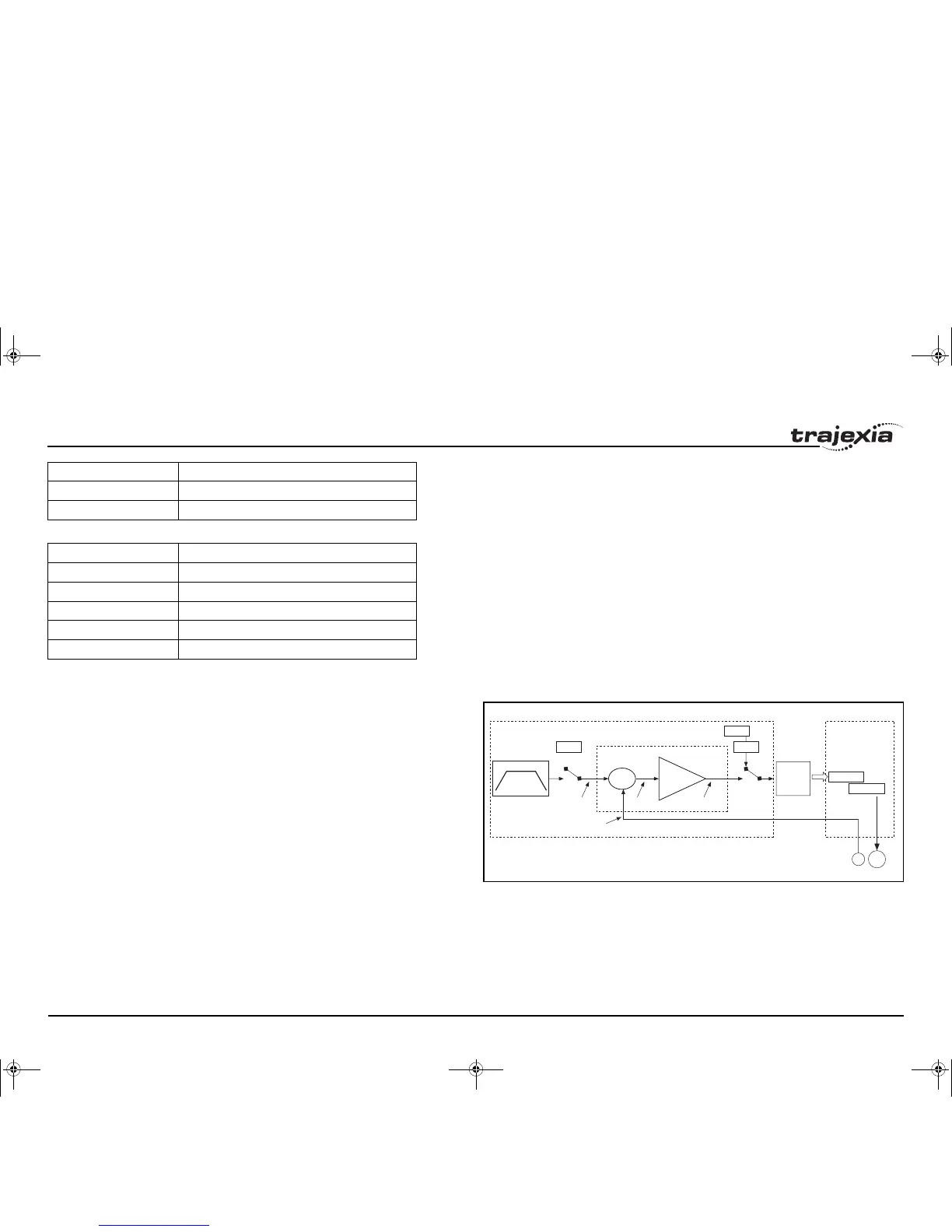
Speed mode examples
fig. 3
In this mode the position loop is closed in Trajexia and the Speed
loop is closed in the Servo Driver. The Speed axis parameter is
sent through the MECHATROLINK-II network to the Servo Driver,
and reads the position feedback.
BASE(0)
ATYPE=41 'MECHATROLINK Speed mode
SERVO=1
WDOG=1
DEFPOS(0)
loop:
MOVE(81920)
WAIT IDLE
WA(100)
DEFPOS(0)
GOTO loop
Example 1
Pn202=1 Gear ratio numerator
Pn203=1 Gear ratio denominator
Motion Parameter values Description
UNITS =1 Working in encoder counts
SPEED=200000 Speed setting
ACCEL=1000000 Acceleration setting
DECEL=1000000 Deceleration setting
MOVEMENT=81920 10 Turns
Drive Parameter value Description
Profile generator
Following
Error
Demanded
Position
Measured
Position
Speed
Command
ML-II
Speed
Command
Position
+
_
SERVO SERVO
EM
Speed Loop
Torque Loop
S_REF
TJ1-MC16 TJ1-ML16 SERVO
I52E-EN-03.book Seite 230 Freitag, 29. Juni 2007 11:55 11