Examples and tips
PROGRAMMING MANUAL 234
Revision 3.0
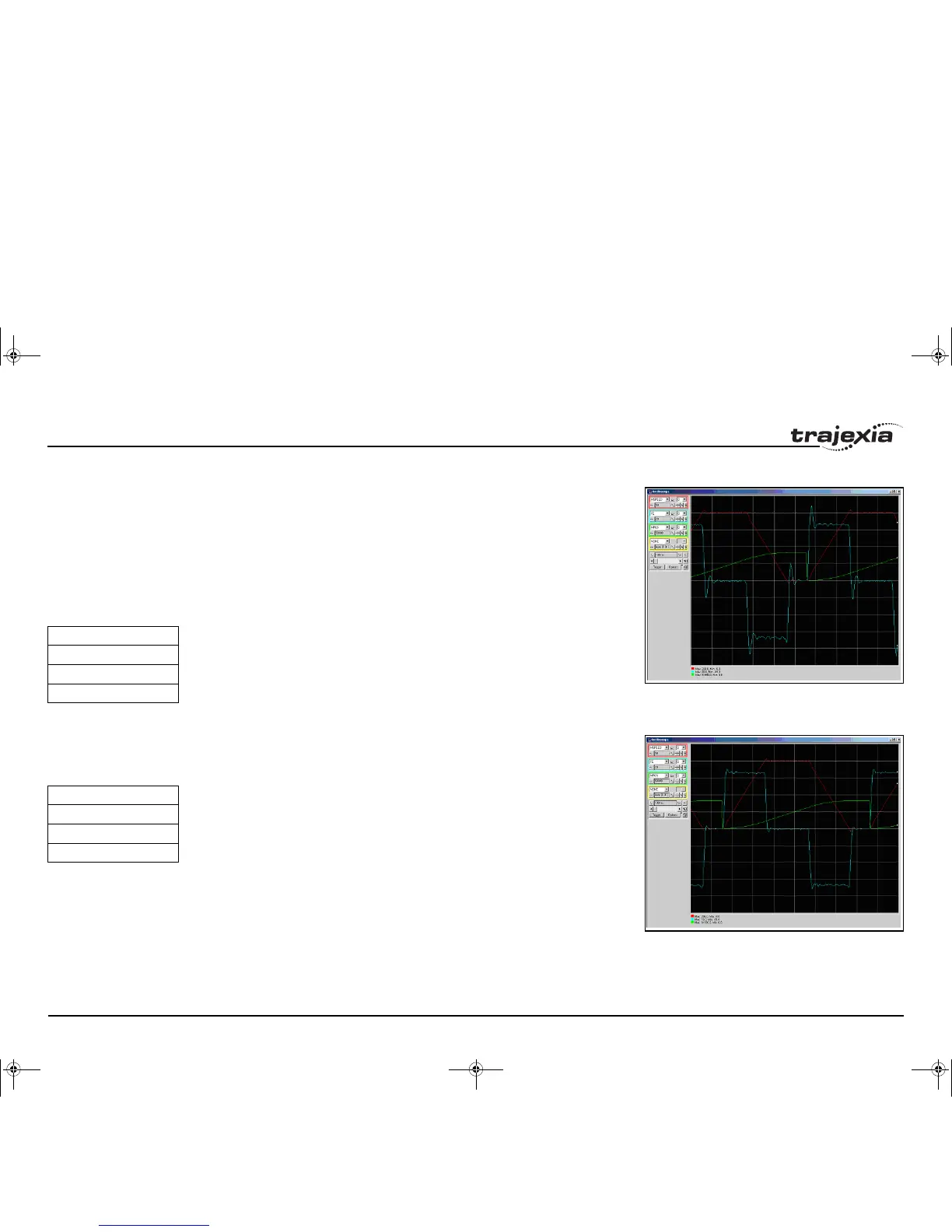
Example 6
fig. 9
With this value of VFF_GAIN the Following Error is proportional to
the acceleration, and smaller than with just proportional gain (the
scaling is 20 units/division). The Following Error approaches zero
during constant speed.
The negative effect of this set of values is the overshoot and
undershoot when the acceleration changes; this can be reduced
but not eliminated by increasing the speed loop gain, if the
mechanical system can cope with a high gain.
The parameter values for the example are:
/i
Example 7
fig. 10
The value of the rigidity is increased from 6 to 8. The overshoot/
undershoot is smaller but the motor has more vibration.
The parameter values for the example are:
/i
Motion Parameter values
P_Gain=131072
VFF_GAIN=1573500
Fn001=6
Motion Parameter values
P_Gain=131072
VFF_GAIN=1573500
Fn001=8
I52E-EN-03.book Seite 234 Freitag, 29. Juni 2007 11:55 11