Examples and tips
PROGRAMMING MANUAL 236
Revision 3.0
• The tuning is more simple, only the rigidity (Fn001) and, if
necessary, the feedforward gain (Pn109) needs to be set.
• The position loop in the servo is faster (250µs) than in Trajexia
and it is turned together with the speed loop.
• There is no sample time delay between "Target position" and
"Measured position”.
To do a finetune the different gain parameters can be changed
individually.
BASE(0)
ATYPE=41 'MECHATROLINK Position mode
SERVO=1
DRIVE_CONTROL=2 'To monitor the Following Error in
'DRIVE_MONITOR
WDOG=1
DEFPOS(0)
loop:
MOVE(81920)
WAIT IDLE
WA(100)
DEFPOS(0)
GOTO loop
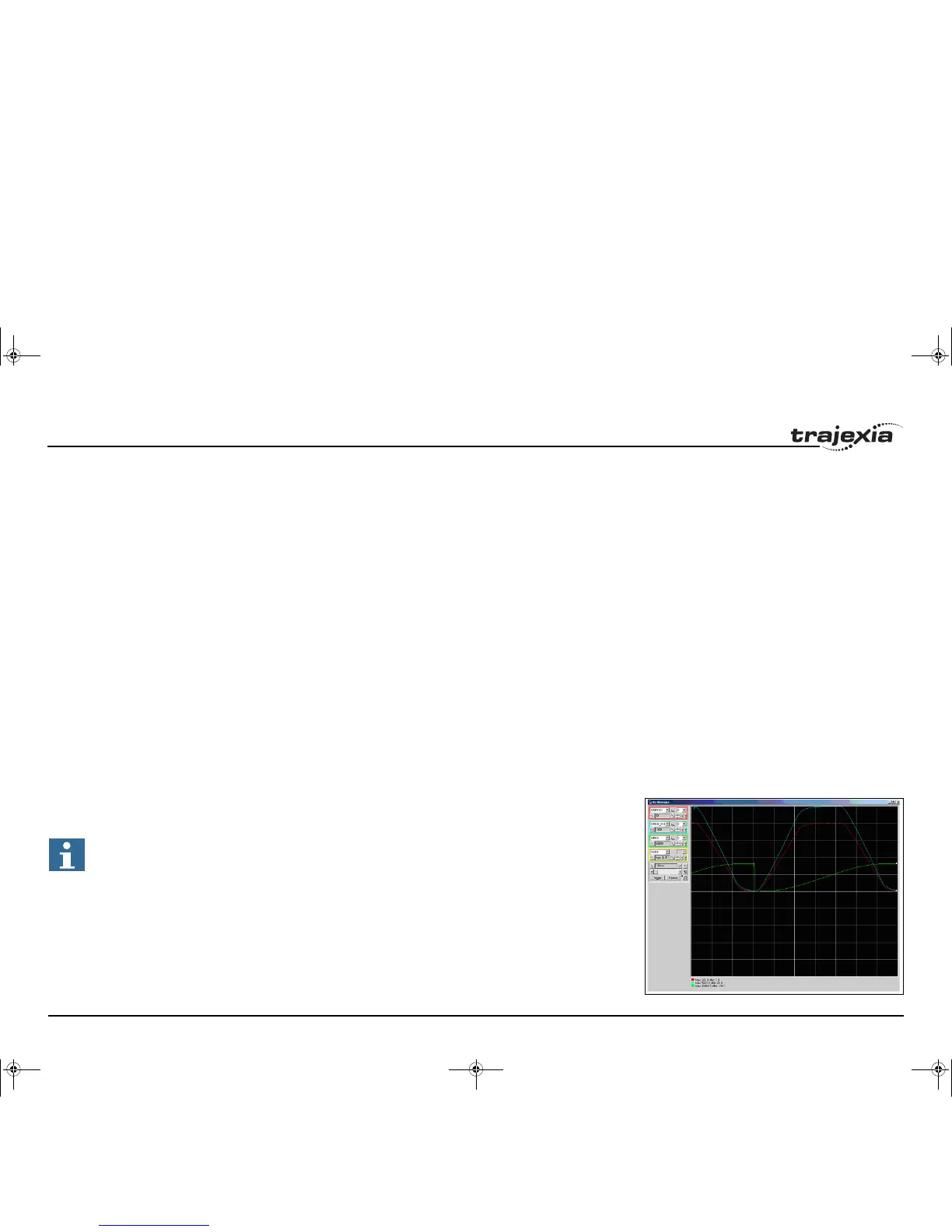
Example 1
fig. 13
The Following Error is proportional to the speed. There is a "soft
profile" due to the low rigidity setting (low gain).
The parameter values for the example are:
Note:
The colours and scale of the oscilloscope for position
mode are as follows:
Red: MSPEED (Measured Axis speed). Units is 50 units/
ms/division
Blue: DRIVE_MONITOR (set as Following Error in the
Servo Driver). Units is depending on the graph
Green: MPOS (Measured Axis position). 50000 units/divi-
sion
I52E-EN-03.book Seite 236 Freitag, 29. Juni 2007 11:55 11