159
Trinity F90+ user manual
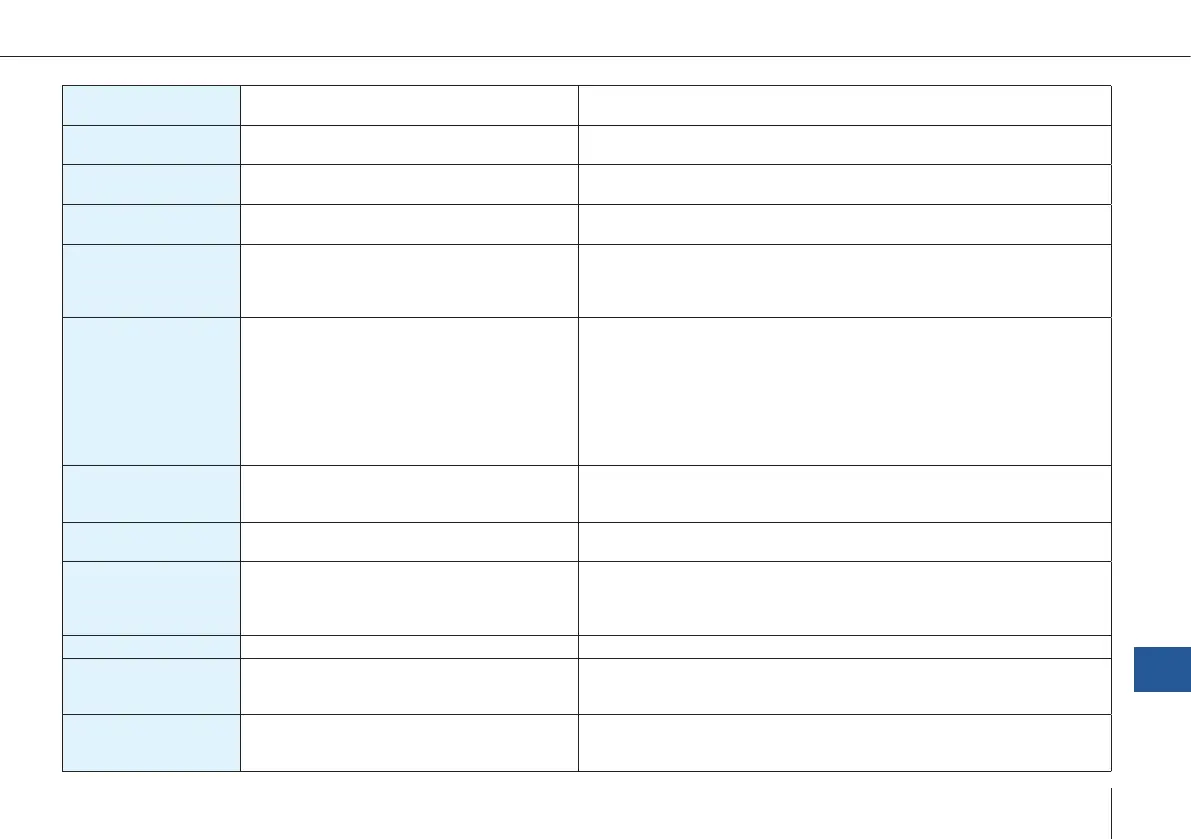
MAG SELFTEST FAILED Sensor initialization error during startup. Disconnect the battery from the UAV and connect it again.
MISSION ERROR Mission is incorrect. Please check the message box in QBase for additional information.
MISSION FINISHED The automated ight is nished. Please land the UAV manually at the home waypoint by carefully pulling the
left stick towards yourself.
MISSION NOT
COMPLETE
Missing data in mission. 1. Repeat uploading the ight plan to the UAV.
2. Repeat the preight check.
MOTOR
CONTROLLER ERROR
Motor (1,2 or 3) RPM too high or
too low or motor current too high or too low
Error during arming.
RPM: Please make sure that the UAV is aligned horizontally during arming.
Current: Disconnect the battery from the UAV and connect it again.
MOTOR TEMP.
TOO HIGH
Temperature monitoring during hover mode.
Temperature of at least one motor
controller (ESC) is too high during the preight
check or during hovering.
green: <65°C = ne
yellow: >65° C = warning
red: >95°C = emergency landing
During preight check: Let the UAV cool down and try again.
After Retransition: Land the UAV carefully as normal. Let the UAV cool down.
green: No action required.
yellow: Let the UAV cool down after ight until it is green again.
red: automatic emergency landing.
If availaable please use the ESC cooling station as described in chapter 6.7
MOTORS ERROR Motor error during the preight check or during
arming. One of the motors / propellers does not
run correctly.
1. Disconnect the battery from the UAV and connect it again.
2. Turn on the UAV again.
3. Repeat the preight check.
MOVING The UAV is moving during the preight check. Ensure that the UAV is not moving to allow a correct
initialization.
NO TELEMETRY The remote control does not receive data from
the UAV anymore. Without this link, the data
displayed at the remote control can not be
updated.
The UAV is too far away for the range of the RC telemetry link.
OK The calibration was succesful. –
OUT OF
TRANSITION
DIRECTION
The direction of the UAV does not comply with
the allowed transition cone during auto climb.
Automatic hover to base and landing is initiated.
PAYLOAD ERROR A communication error to the payload occurred
during the preight check.
1. Disconnect the battery from the UAV and connect it again.
2. Turn on the UAV again.
3. Repeat the preight check.
Troubleshooting
14