60
Trinity F90+ user manual
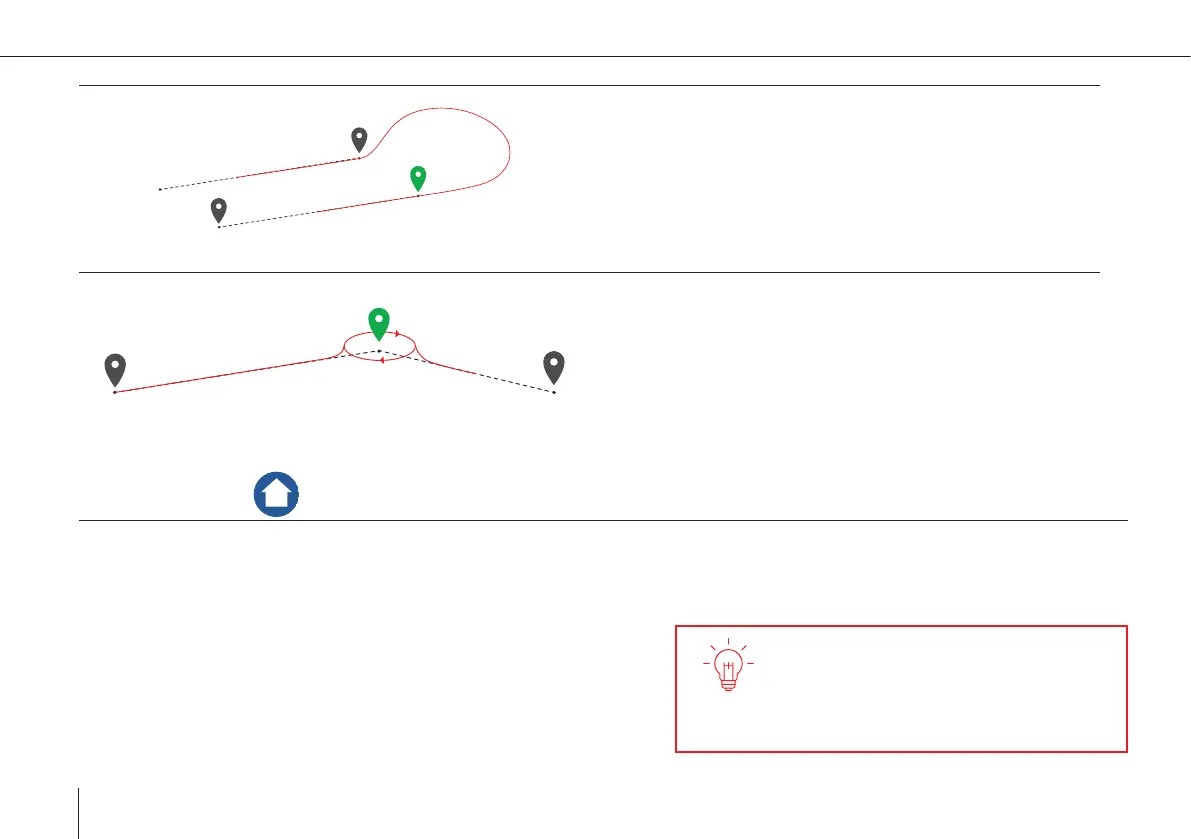
Aligned Direction
• The ight track is automatically determined in order to
match the waypoint and the direction of the next leg.
• Subtypes can manually be selected in the waypoint pro-
perty menu. For photogrammetry missions it is recom-
mended to set the subtype to Auto. Not all subtypes are
applicable for every scenario. Non applicable subtypes
are indicated by a red dotted line between the waypoints.
Loiter
• The UAV enters a circular trajectory around the waypo-
int. The radius of the trajectory, the circling duration and
the circling direction can be set in the waypoint property
menu.
• The UAV approaches and leaves the trajectory from the
outside.
Take-Off /Landing
• The UAV will take off and land at the exact same position
• Take-Off/Landing is performed in hover mode
• Dene the planned take-off and landing position by clicking on the map
• Move the position by dragging. The real take-off position is automatically adjusted right before the start of the ight.
If there is an obstacle in the ight track
of the descent circle, make sure the re-
transition altitude is 20 meters
(65.6 ft) higher than the obstacle.
Important:
• No obstacles around the Home Waypoint within a radius of
20 meters
• Take-off against wind direction
• No take-off in a wind sheltered area (lee) as turbulences may occur