Sample Project for the Path Interpolation
4.6 Interconnecting a path object
TO Path Interpolation
Function Manual, 11/2010
103
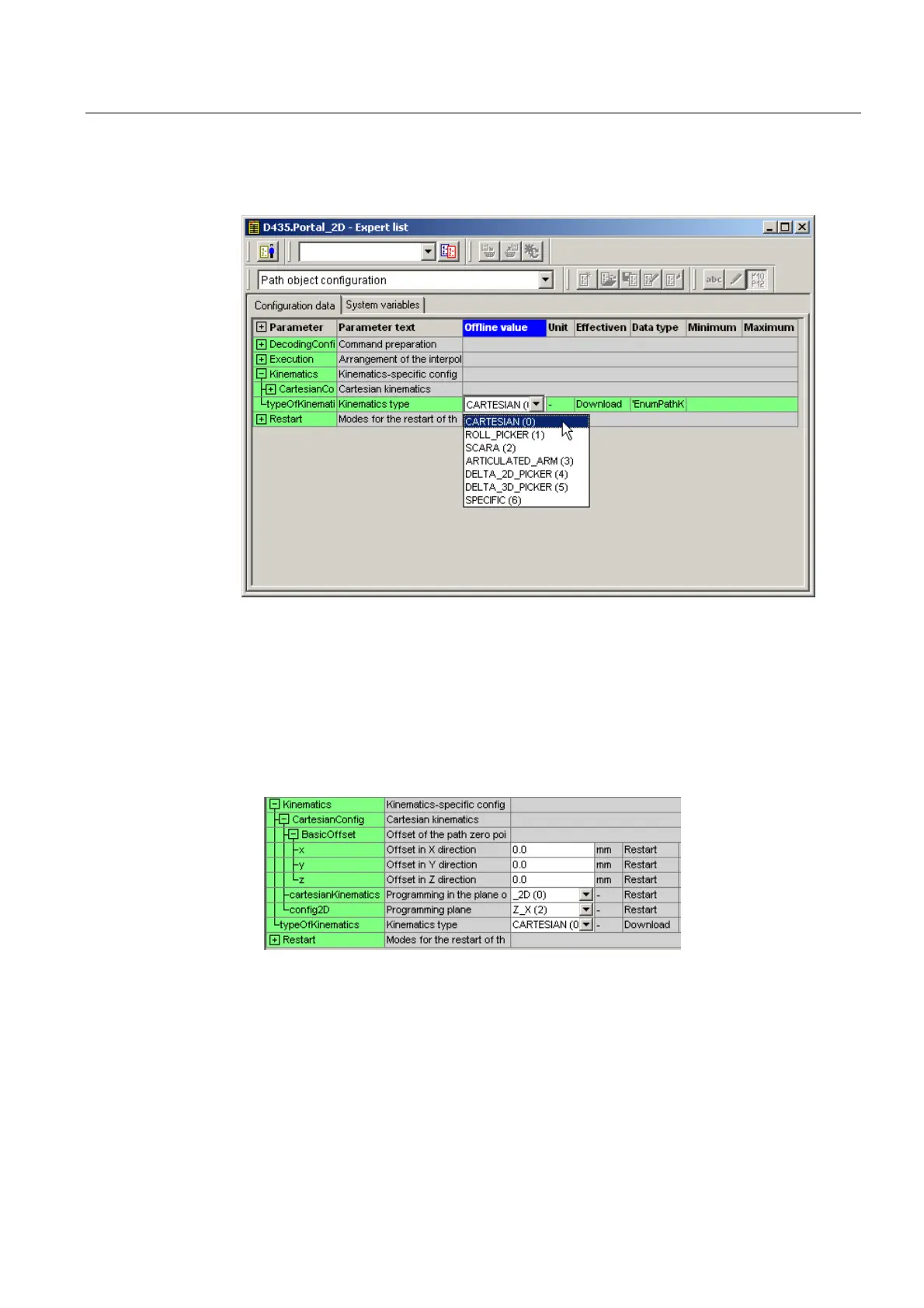
3. Select the required kinematics for Kinematics > typeOfKinematics. Here, you set
CARTESIAN.
Figure 4-9 Setting the CARTESIAN kinematics type
4. Open CartesianConfig and make the following settings:
– BasicOffset.x: 0.0 mm
– BasicOffset.y: 0.0 mm
– BasicOffset.z: 0.0 mm
– cartesianKinematicsType: _2D
– config2D: Z_X
Figure 4-10 Making kinematic system settings for the 2D gantry
4.6 Interconnecting a path object
Open the Interconnections window for the path object. In this screen form, assign the axes to
the path object.
Because the kinematics operate in the Z-X plane, the Z-axis must be used as first path axis
and the X-axis as second path axis.

 Loading...
Loading...




