Sample Project for the Path Interpolation
4.8 Programming the path interpolation in MCC
TO Path Interpolation
Function Manual, 11/2010
123
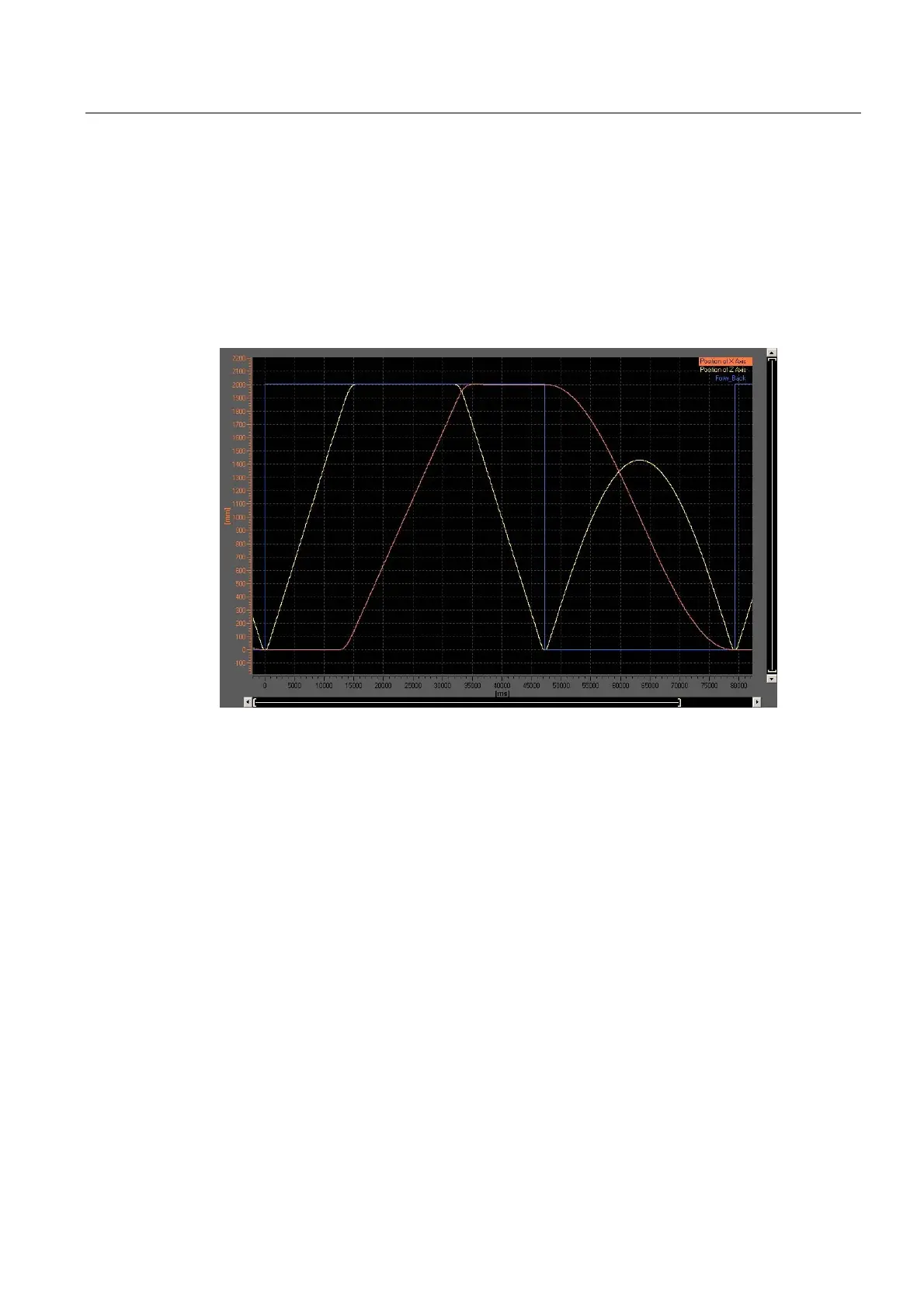
4.8.7 Checking a motion with trace
To see how the motion runs, a trace of the following variables is defined:
● TO.Axis_X.positioningstate.actualposition
● TO.Axis_Z.positioningstate.actualposition
● Forw_back
A log of the motion loop now has the following form:
Figure 4-36 Result of the example as trace

 Loading...
Loading...




