Sample Project for the Path Interpolation
4.8 Programming the path interpolation in MCC
TO Path Interpolation
118 Function Manual, 11/2010
4.8.3.7 Programming the E-F linear path
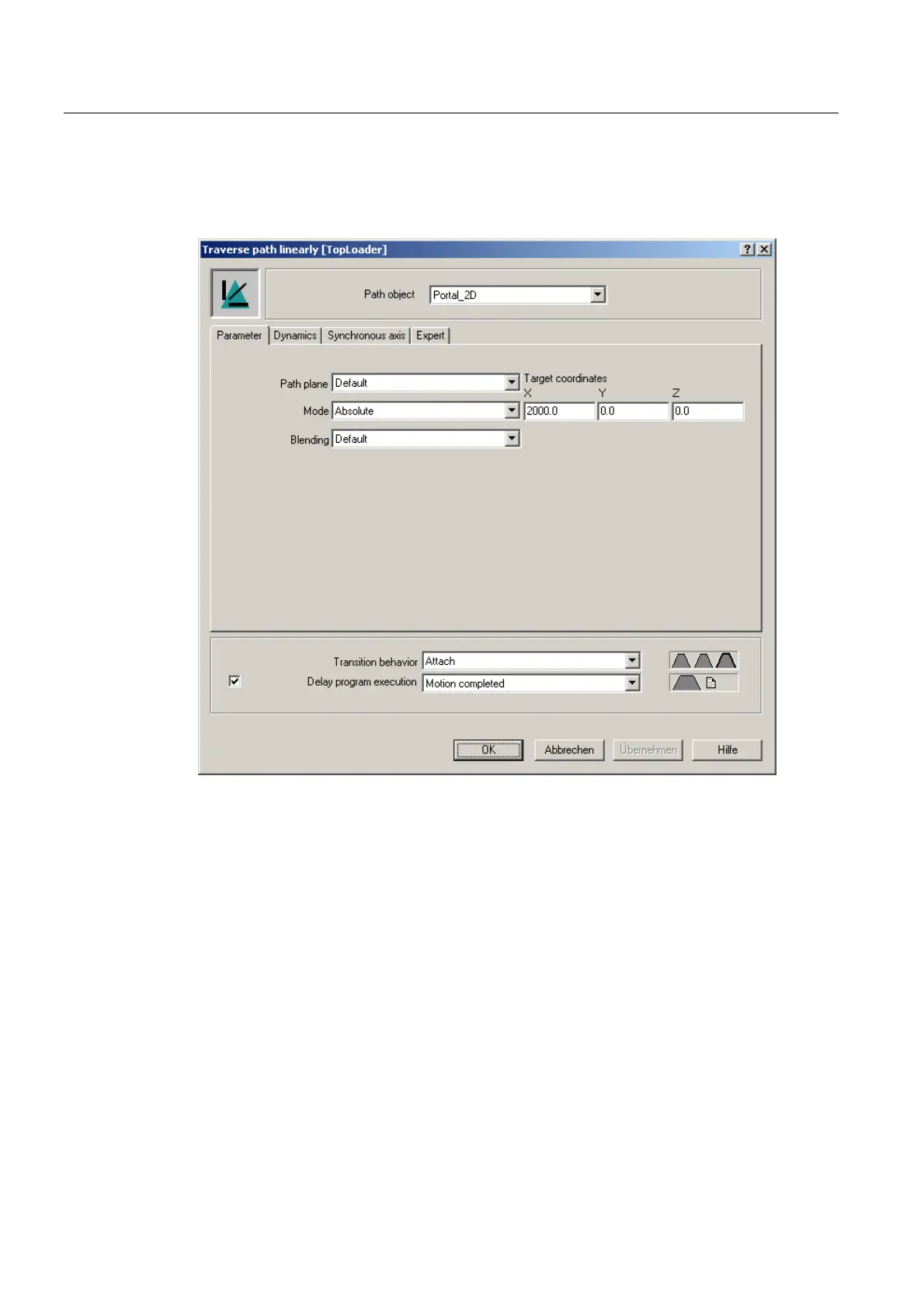
For the E-F linear path, add the travel linear path command and make the following settings:
Figure 4-29 Programming the E-F linear path
4.8.3.8 Programming the F-A return travel
The gantry grabber should return to the initial position taking a circular path. The start point
of the circular path is (2000, 0), the end point is (0, 0).
There are several ways of defining the circular path. For this example, the circular path
should be defined using an intermediate point and the end point. The point (1000, 1000) is
chosen as intermediate point.

 Loading...
Loading...




