Configuring the Path Object
3.7 Defining limits
TO Path Interpolation
Function Manual, 11/2010
91
3.7 Defining limits
● In the project navigator, double-click Limits under the object.
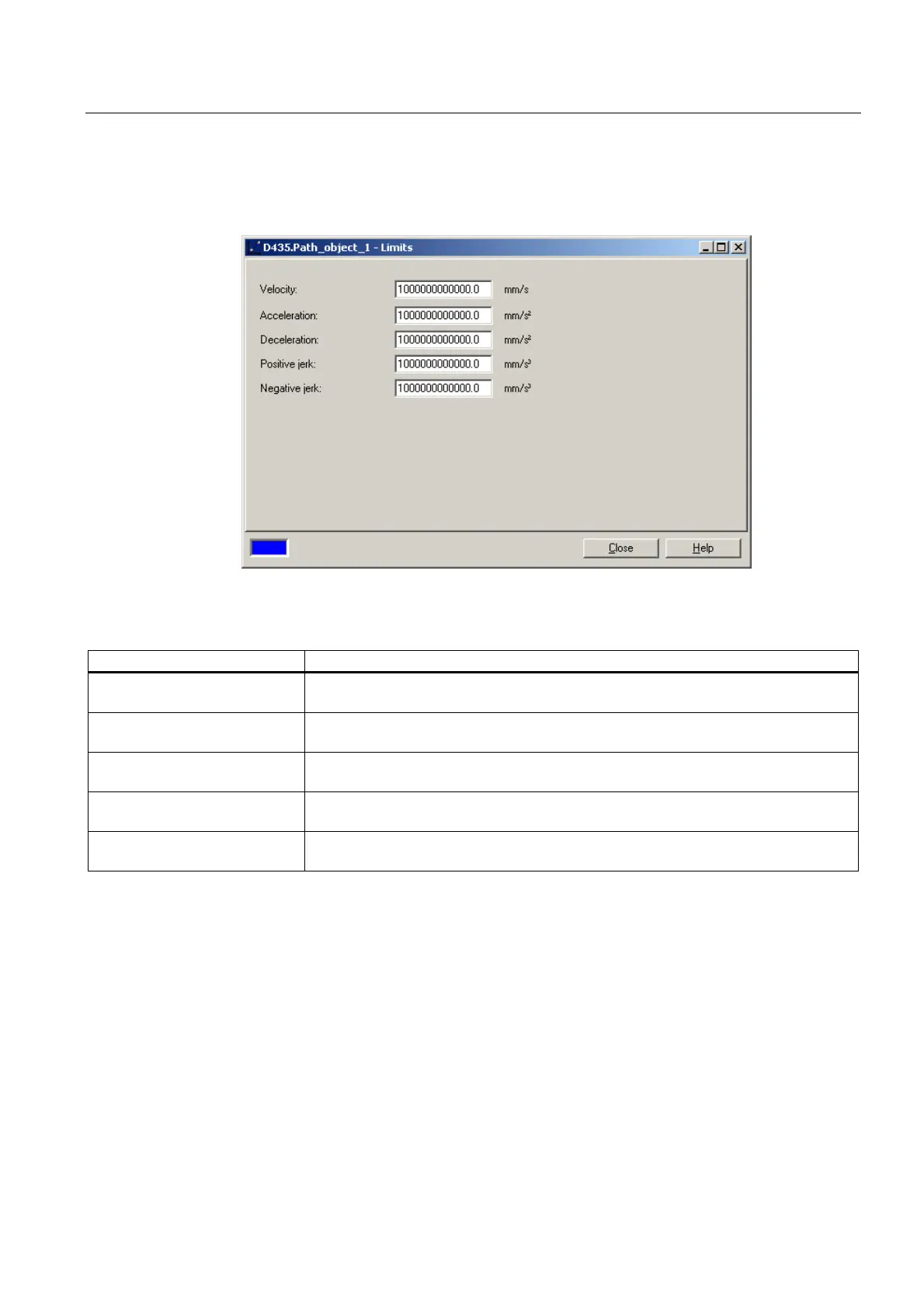
Figure 3-8 Limits on the path object
In this window, you specify the maximum dynamic path limit values:
Field/button Meaning/Instruction
Velocity Here, you enter the maximum velocity.
(limitsOfPathDynamics.velocity)
Acceleration Here, you enter the maximum acceleration.
(limitsOfPathDynamics.positiveAccel)
Deceleration Here, you enter the maximum deceleration.
(limitsOfPathDynamics.negativeAccel)
Positive jerk Here, you enter the maximum jerk during acceleration build-up / deceleration reduction.
(limitsOfPathDynamics.positiveJerk)
Negative jerk Here, you enter the maximum jerk during acceleration reduction / deceleration build-up.
(limitsOfPathDynamics.negativeJerk)
For additional information, see Path dynamics (Page 31).
The meaning of the configuration data and the permissible value ranges can be found in the
SIMOTION reference lists.

 Loading...
Loading...




