Basics of Path Interpolation
2.13 Kinematic adaptation
TO Path Interpolation
52 Function Manual, 11/2010
2.13.3.4 Roller picker
3DWKD[LV
3DWKD[LV
*XLGHUROOHUV
7RRO
&RQY
H\RU
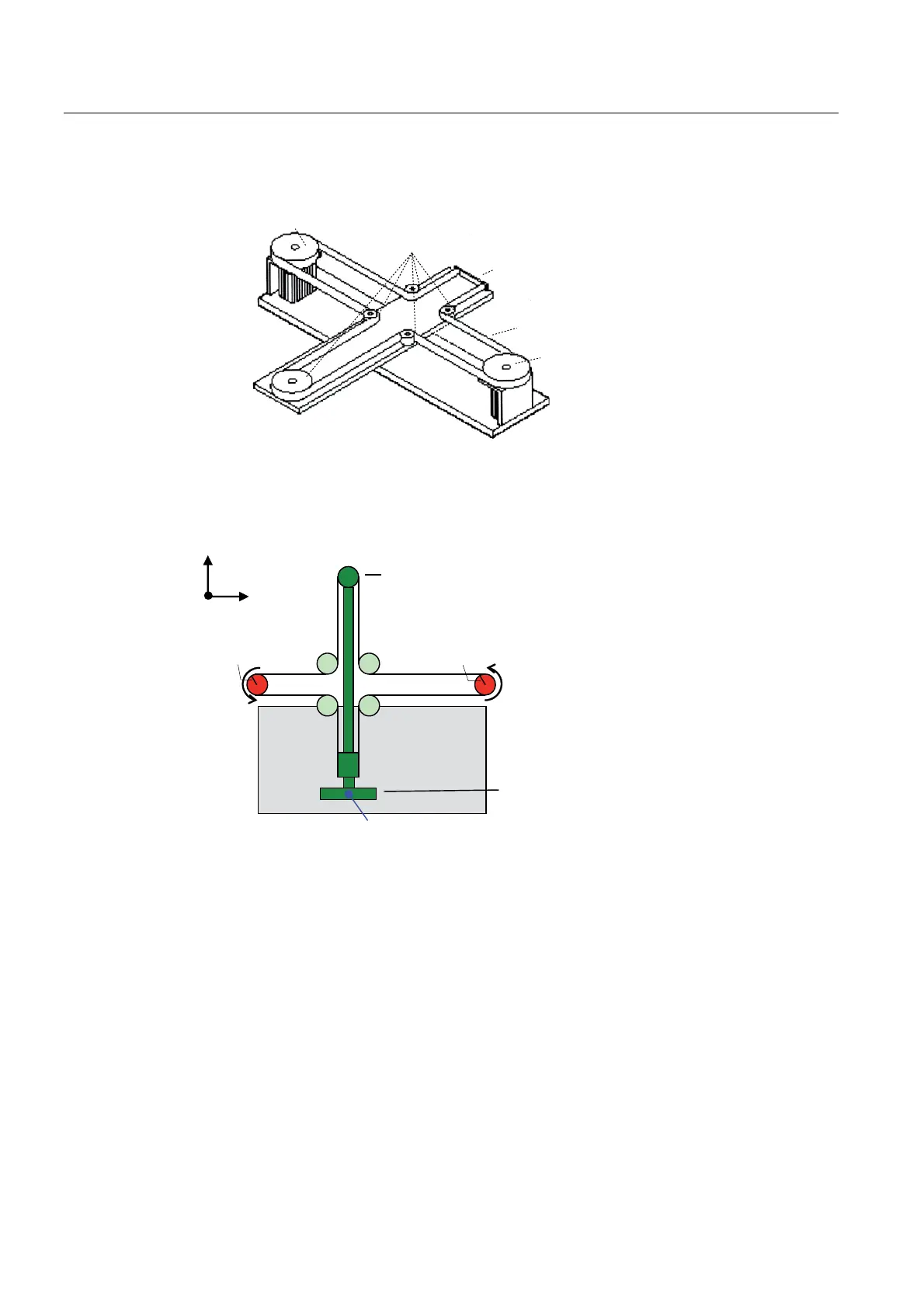
Figure 2-37 Roller picker: Representation of the axis system
The roller picker has two-dimensional kinematics. You can configure roller pickers in all three
main planes. This description assumes a configuration in the X-Y plane.
x
I
+
y
I
+
(R
1I
, φ
1I
) (R
2I
, φ
2I
)
*XLGHUROOHUV
$
$
7RRO
(QGSRLQW
&DUWHVLDQ
]HURSRLQW
7KHNLQHPDWLF]HURSRLQWLVIRU$ $
DQGLVORFDWHGDWWKHHQGSRLQW
Figure 2-38 Kinematics of roller picker (deflection roll on the opposite side of the tool)
The deflection roll must be located on the opposite side of the tool.

 Loading...
Loading...




