Basics of Path Interpolation
2.14 Motion sequence on the path object
TO Path Interpolation
78 Function Manual, 11/2010
2.14.3.4 Defining the position of the OCS relative to the motion sequence reference value
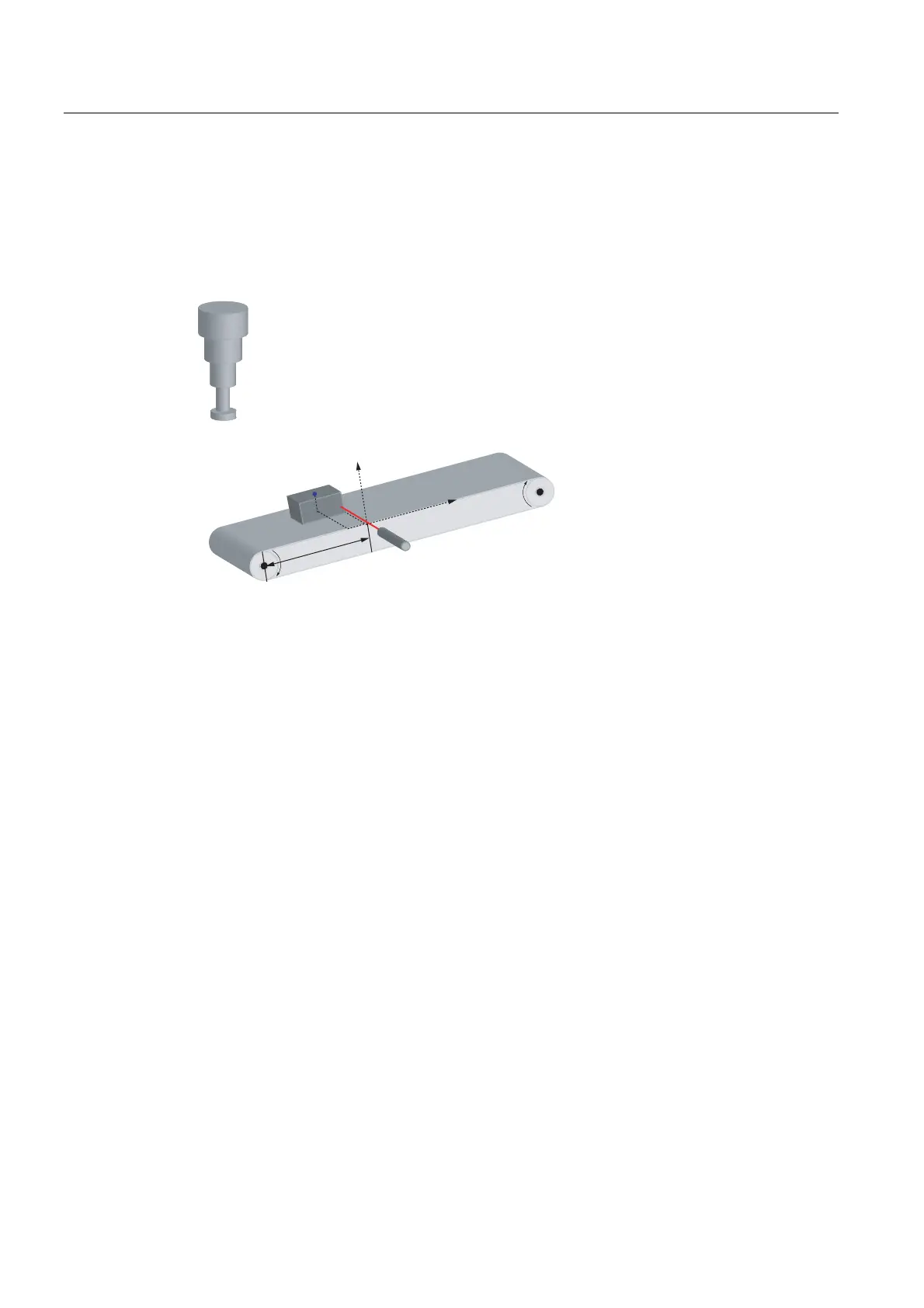
The sensor, for example, a light barrier, is triggered by the passing product. The current
value of the CONVEYOR_BELT external encoder is stored in the belt_position variable.
Because the position of the sensor related to the reference position of the OCS is known, the
position of the product with regard to the motion sequence reference value is known.
VHQVRUBSRVLWLRQ
2&6
Figure 2-67 Defining the position of the OCS
myRetDINT :=
_redefinePathObjectOcs(
pathObject:=Portal_3D,
ocsNumber:=1,
mode:=RELATIVE,
value:=belt_position - sensor_position
);
2.14.3.5 Synchronizing motion on the path object to the coupled OCS
The handling device should be coupled synchronous with the product after a synch_space
travel length after the sensor.
The acting point position of the grabber is specified in the OCS. In the example, this is done
using the offset_x, offset_y and offset_z variables. This displacement is then used for
positioning after synchronization by means of a command in the OCS so that the gripper can
hold the product above its center of gravity.

 Loading...
Loading...




