Basics of Path Interpolation
2.13 Kinematic adaptation
TO Path Interpolation
64 Function Manual, 11/2010
Possible link constellations
LinkConstellation 1 Angle of axis A3 in the range of [0°, 180°) relative
to the kinematic zero point
Angle of axis A1 corresponds to atan(EPy/EPx)
2 Angle of axis A3 in the range of [-180°, 0°) relative
to the kinematic zero point
Angle of axis A1 corresponds to atan(EPy/EPx)
3 Angle of axis A3 in the range of [0°, 180°) relative
to the kinematic zero point
Angle of axis A1 corresponds to –atan(EPy/EPx)
4 Angle of axis A3 in the range of [-180°, 0°) relative
to the kinematic zero point
Angle of axis A1 corresponds to –atan(EPy/EPx)
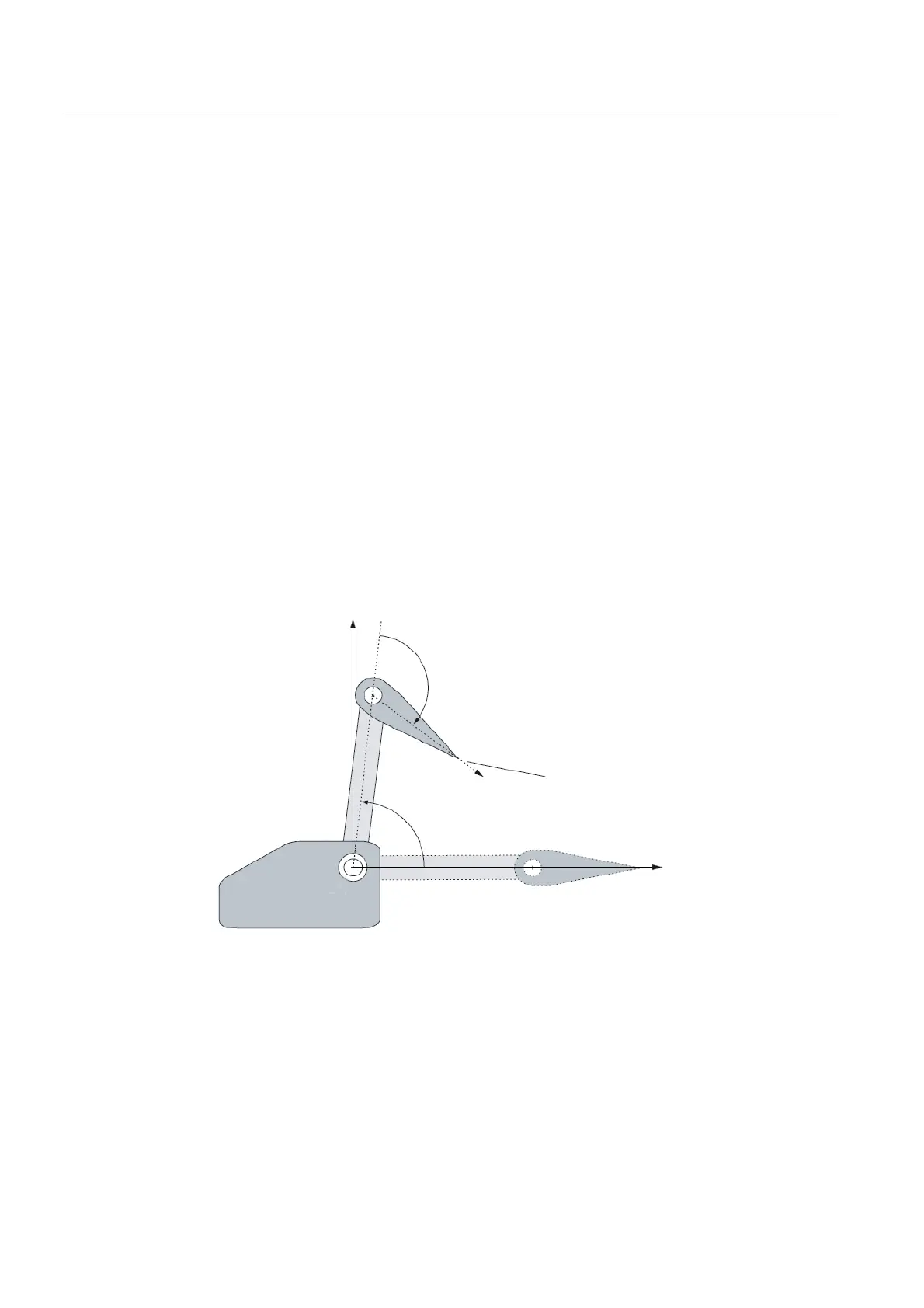
2.13.3.9 2axis articulated arm kinematics
2axis articulated arm kinematics
;
.LQHPDWLF]HURSRLQW
$
$
2IIVHW$
2IIVHW$KDVDQHJDWLYHYDOXHLQWKLVFDVH
.LQHPDWLF]HURSRLQW
2IIVHW$
1HXWUDOSRVLWLRQRIWKH
NLQHPDWLFV
<
Figure 2-53 Display of the axes

 Loading...
Loading...




