Programming/homing path interpolation
5.1 Programming
TO Path Interpolation
132 Function Manual, 11/2010
5.1.2.6 Object coordinates
● _enablePathObjectTrackingSuperimposed()
Starts the synchronization action of a path object on an OCS.
● _getPathObjectBCSFromOCSData()
Calculates a position (x, y, z) in the base coordinate system of the path object using the
position in the object coordinate system.
● _getPathObjectOCSFromBCSData()
Calculates a position (x, y, z) in the object coordinate system using the position in the
base coordinate system of the path object.
● _redefinePathObjectOCS()
Displaces the object coordinate system along the X-axis (travel direction).
● _setPathObjectOCS()
Defines the translational and rotatory displacement of the object coordinate system
compared with the base coordinate system of the path object.
5.1.3 Command execution
5.1.3.1 Command buffer
The path object has three command buffers for every command.
● One buffer for motion commands has an immediate (IMMEDIATELY) and sequential
(SEQUENTIAL) effect
● A separate buffer for stopping path motion (_stopPath() ) and continuing path motion
(_continuePath() )
● A buffer for other (i.e. superimposed) instructions
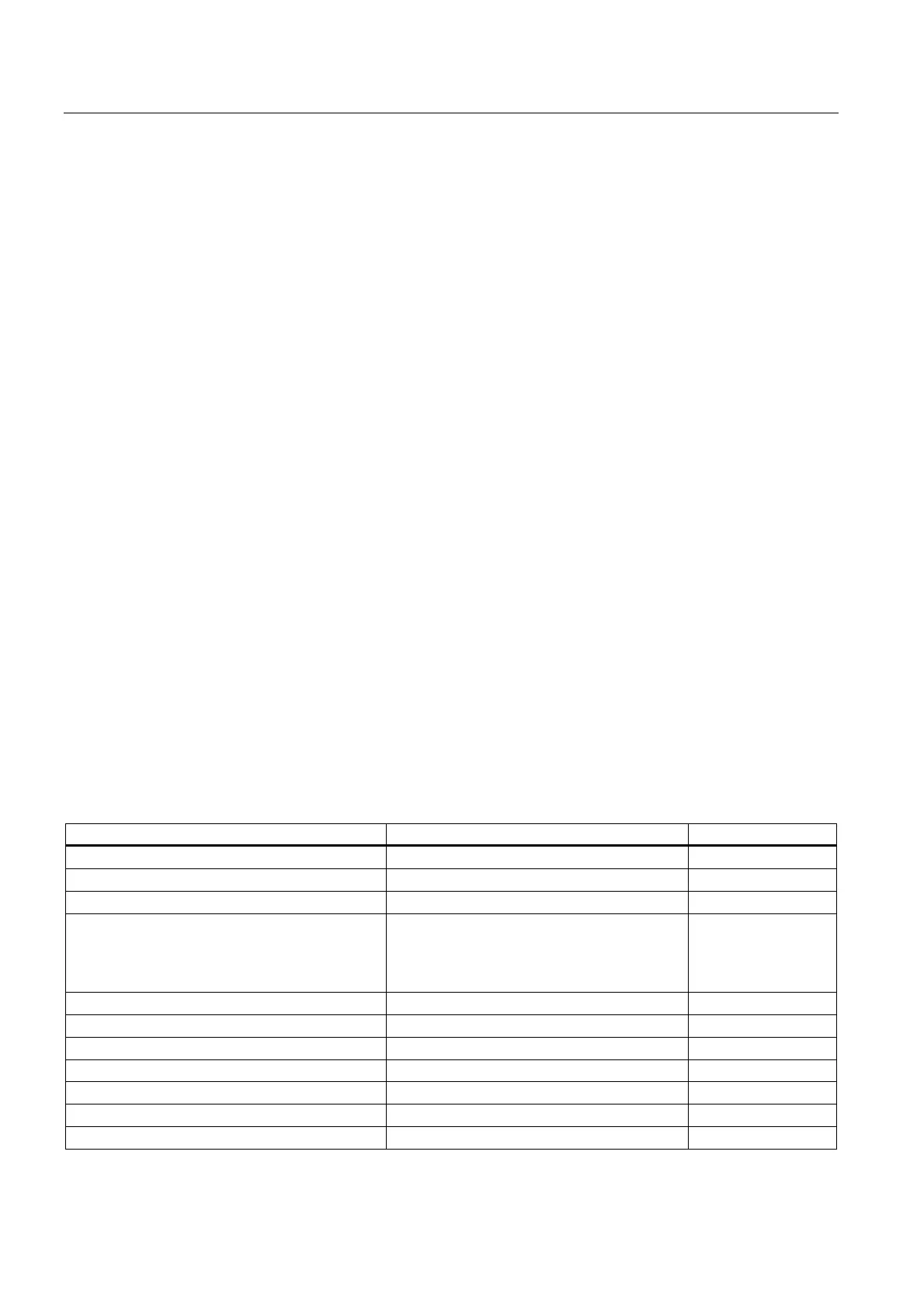
Command Function Position*)
_movePathLinear() Starts linear path motion 4
_movePathCircular() Starts circular path motion 4
_movePathPolynomial() Starts polynomial path motion 4
_stopPath() Stops motion 1 for stop without
command abort
4 for stop with
command abort
_continuePath() Resume motion 1
_getLinearPathData() Linear path length 5
_getCircularPathData() Circular path length 5
_getPolynomialPathData() Polynomial path length 5
_getPathCartesianPosition() Axis to path 5
_getPathAxesPosition() Path to axis 5
_getPathCartesianData() Axis to path with dynamic response data 5

 Loading...
Loading...




