Programming/homing path interpolation
5.1 Programming
TO Path Interpolation
Function Manual, 11/2010
133
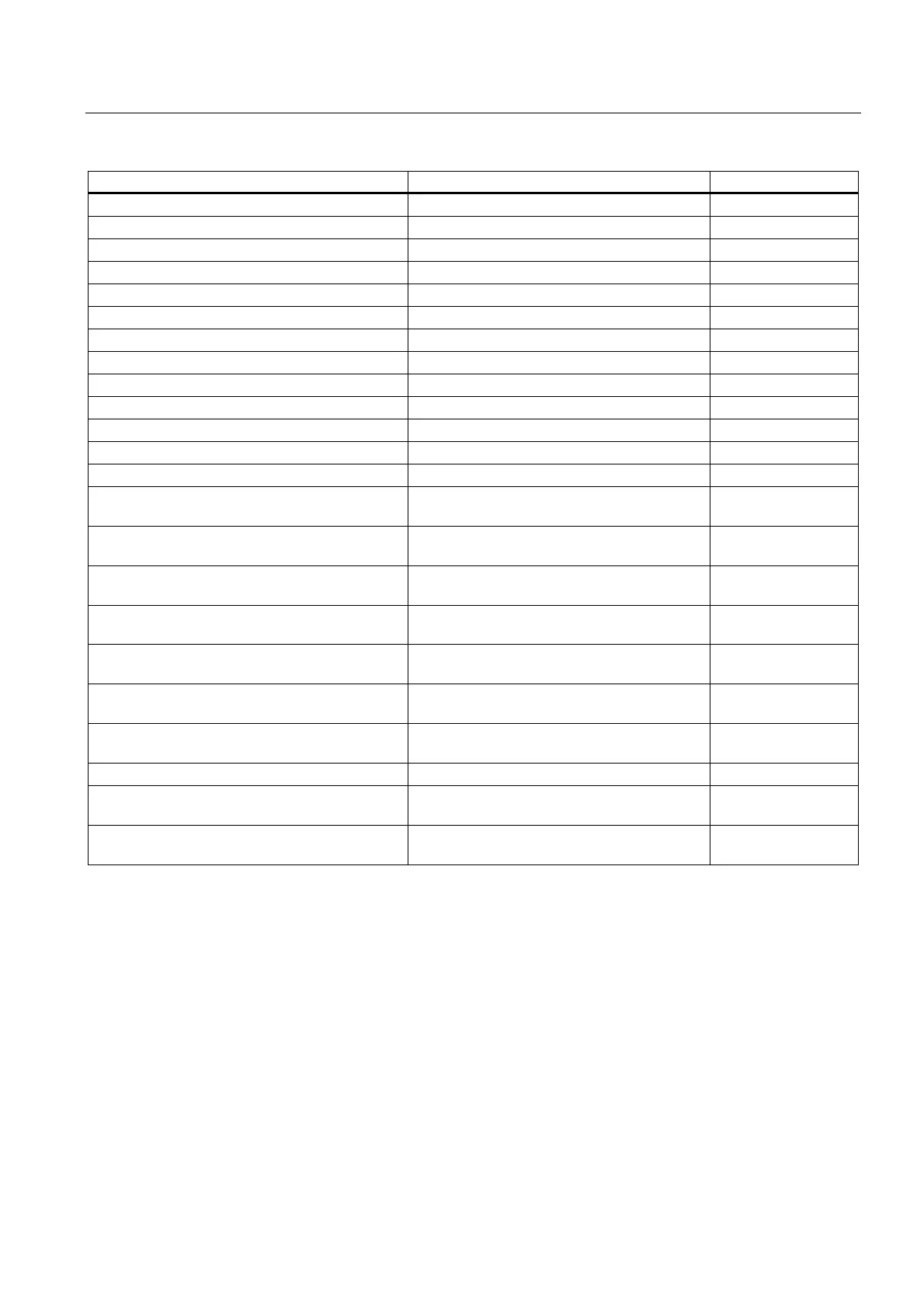
Command Function Position*)
_getPathAxesData() Path to axis with dynamic response data 5
_getLinearPathGeometricData() Geometric linear path data 5
_getCircularPathGeometricData() Geometric circular path data 5
_getPolynomialPathGeometricData() Geometric polynomial path data 5
_enablePathObjectSimulation() Places path object in simulation mode 3
_disablePathObjectSimulation() Resets the path object out of simulation 3
_resetPathObject() Resets the path object 5
_resetPathObjectError() Reset error 5
_getStateOfPathObjectCommand() Read out command status 5
_getMotionStateOfPathObjectCommand() Read out motion phase of a command 5
_bufferPathObjectCommandId() Permanently stores the command ID 5
_removeBufferedPathObjectCommandId() Terminates permanent storage 5
_getPathObjectErrorNumberState() Reads out the status of a path object error 5
_getPathObjectErrorState() Reads out the status and number of the
pending path object error
5
_resetPathObjectConfigDataBuffer() Deletes that configuration data collected in the
buffer since the last activation
5
_getStateOfPathObjectMotionBuffer() Returns the status of the command queue of
the path object.
5
_resetPathObjectMotionBuffer() Clears all pending commands from the
command queue.
5
_enablePathObjectTrackingSuperimposed() Starts the synchronization action of the path
object on an OCS.
3
_getPathObjectBCSFromOCSData() Calculates a position in the BCS using a
position in the OCS.
5
_getPathObjectOCSFromBCSData() Calculates a position in the OCS using a
position in the BCS.
5
_redefinePathObjectOCS() Displaces the OCS along the X-axis. 3
_setPathObjectOCS() Defines the displacement of the OCS
compared with the BCS.
3
_cancelPathObjectCommand() Cancels a command that is waiting or active in
the Ipo.
1
*) Legend:
1 Buffer for Stop-Continue commands
2 Not used
3 Buffers for superimposed commands
4 Sequential command buffer
5 Not assigned to the command buffers (commands can be executed in parallel)

 Loading...
Loading...




