Basics of Path Interpolation
2.14 Motion sequence on the path object
TO Path Interpolation
Function Manual, 11/2010
79
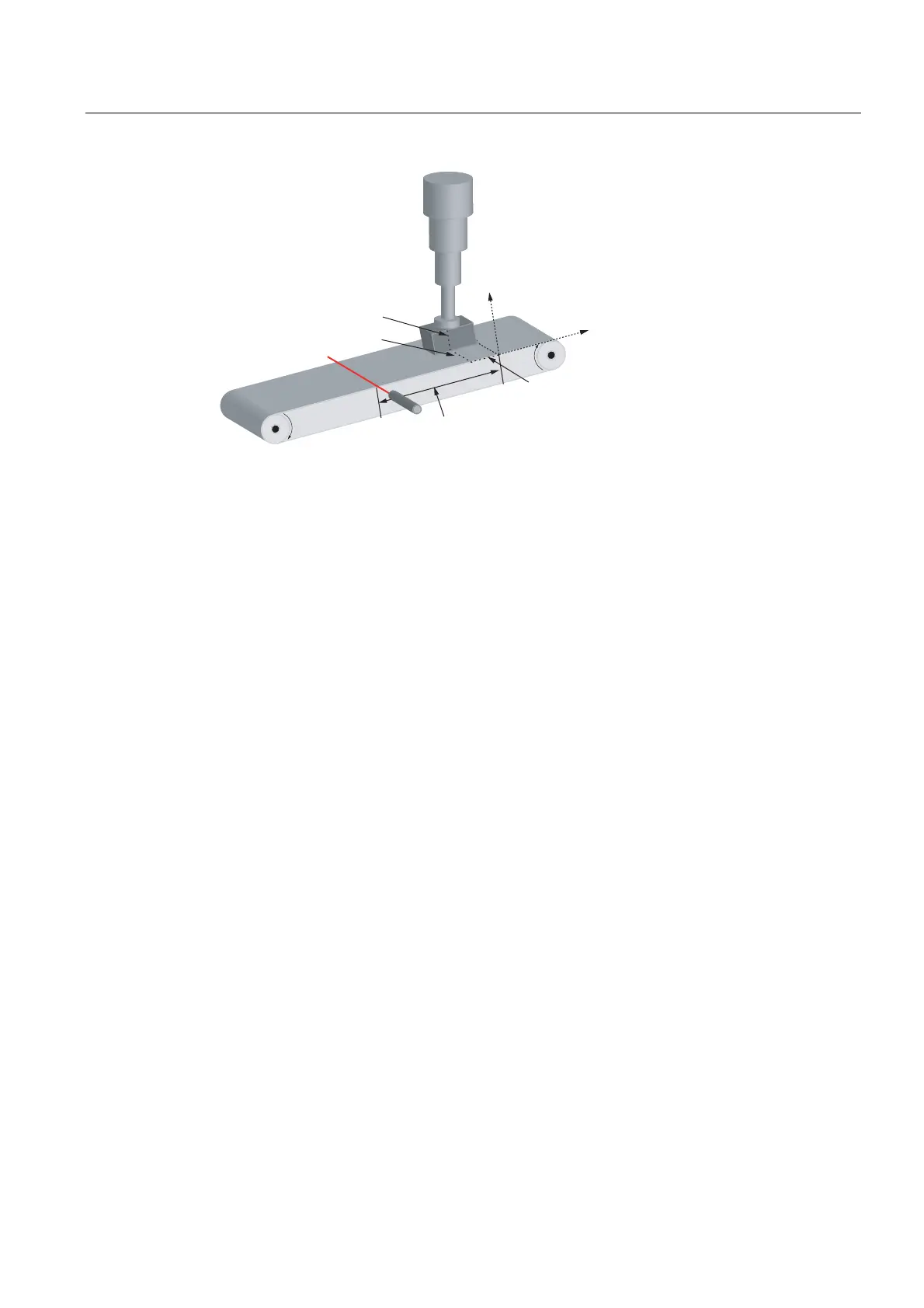
V\QFKBVSDFH
2&6
RIIVHWB[
RIIVHWB\
RIIVHWB]
Figure 2-68 Synchronizing the handling device
myRetDINT :=
_enablePathObjectTrackingSuperimposed(
pathObject:=Portal_3D,
ocsNumber:=1,
synchronizingMode:=ON_POSITION,
position:=sensor_position + synch_space
);
When the status "synchronous" has been reached (ocs[1].trackingState =
SYNCHRONIZED), the command for positioning the gripper at the acting point of the product
(offset_x, offset_y, offset_z) can be issued in the OCS.
myRetDINT :=
_movePathLinear(
pathObject:=Portal_3D,
pathMode:=ABSOLUTE,
x:=offset_x,
y:=offset_y,
z:=offset_z,
csType:=OCS,
csNumber:=1
);
2.14.3.6 Performing path motions in the coupled OCS
The handling device now moves itself 15 mm away from the conveyor and brings the product
to the placement position (dispose_x, dispose_y, dispose_z). The first motion occurs in the
OCS, the second in the BCS. The synchronization is terminated by calling the second
command.
myRetDINT :=
_movePathLinear(
pathObject:=Portal_3D,
pathMode:=RELATIVE,
z:=15.0,
csType:=OCS,
csNumber:=1
);

 Loading...
Loading...




