Basics of Path Interpolation
2.14 Motion sequence on the path object
TO Path Interpolation
Function Manual, 11/2010
77
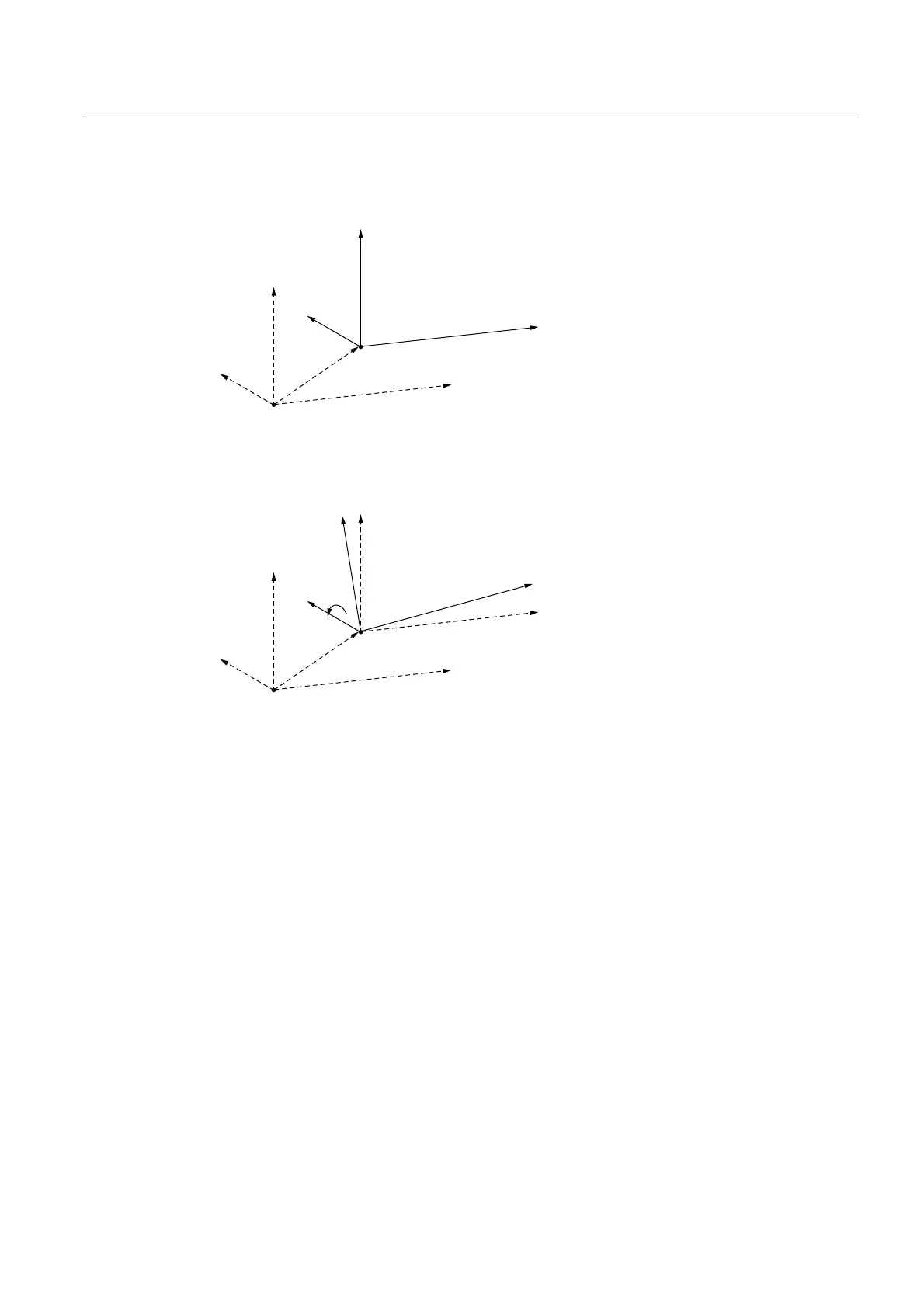
Consequently, the OCS is displaced by 100 mm in the X-direction and 15 mm in the Z-
direction:
[
[
\
\
]
]
%&6
2&6UHIHUHQFHSRVLWLRQ
Figure 2-65 Displacement of the OCS
The OCS is rotated by -15° at the Y-axis.
[
[
\
\
]
]
%&6
3LWFK
2&6UHIHUHQFHSRVLWLRQ
Figure 2-66 Rotation of the OCS
2.14.3.3 Determining the motion sequence reference value of the OCS
The position and motion data of the conveyor are acquired using the CONVEYOR_BELT
external encoder. For the OCS, the base frame is set and activated with the
CONVEYOR_BELT motion sequence reference value. The OCS is then coupled with the
conveyor, in particular, at the position supplied by the CONVEYOR_BELT external encoder.
// Set OCS_1 to CONVEYOR_BELT,
// for the BCS base frame for the OCS,
// use the default settings.
myRetDINT :=
_setPathObjectOcs(
pathObject:=Portal_3D,
ocsNumber:=1,
trackingIn:=CONVEYOR_BELT,
ocsSettingType:=USER_DEFAULT
);

 Loading...
Loading...




