Basics of Path Interpolation
2.10 Allowance for axis-specific traversing range limits
TO Path Interpolation
Function Manual, 11/2010
39
Limiting and monitoring the setpoint error:
● With setting enableCommandValue := NO_ACTIVATE:
– The dynamic limitation is performed without taking the jerk into account.
– The resulting setpoint error is not monitored.
● With setting enableCommandValue := WITHOUT_JERK:
– The dynamic limitation is performed without taking the jerk into account.
– The resulting setpoint error is monitored.
● With setting enableCommandValue := WITH_JERK:
– The dynamic limitation is performed taking the jerk into account.
– The resulting setpoint error is monitored.
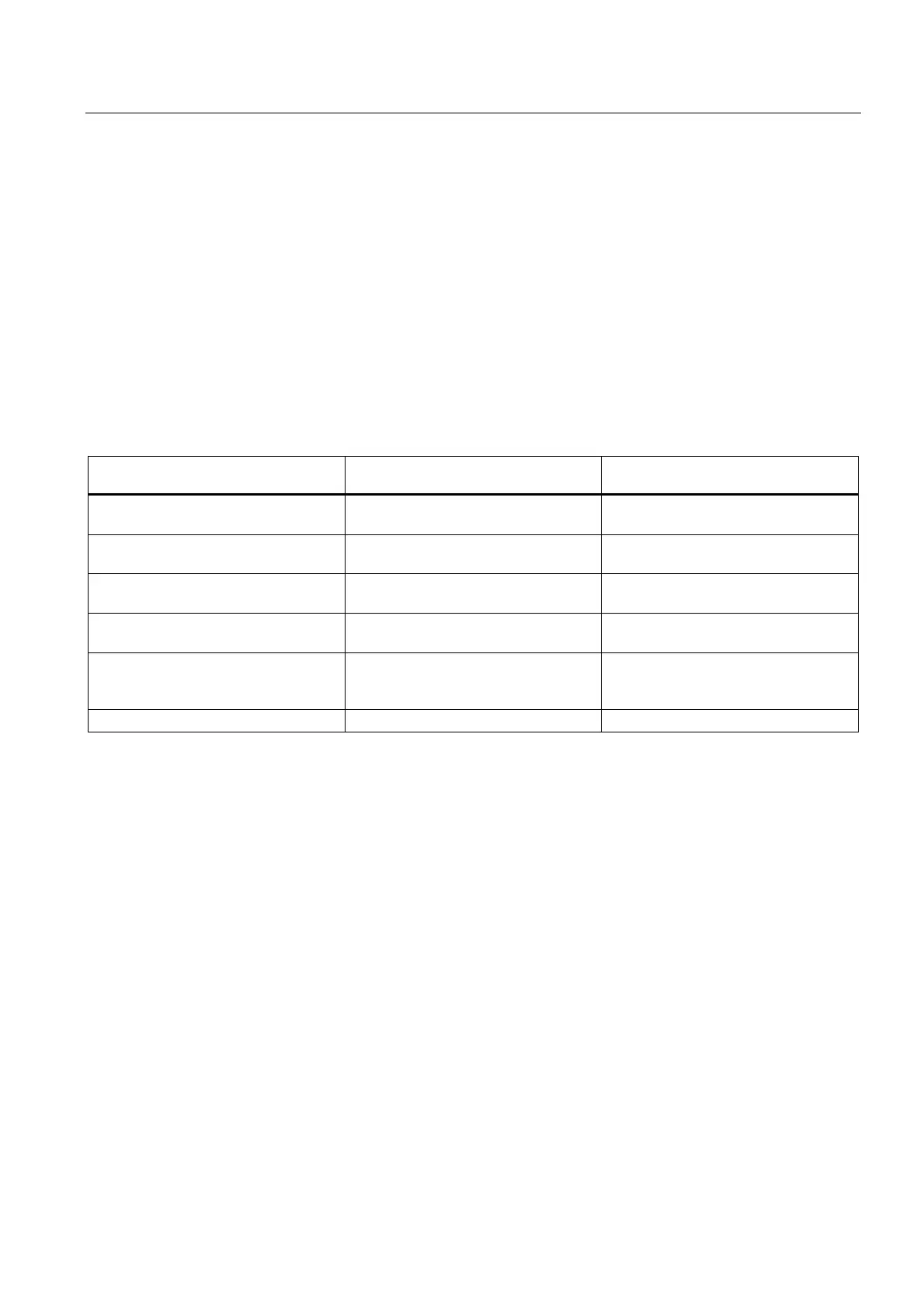
Path motion on the path axis Synchronous motion on the positioning
axis
Activation of monitoring (configuration
data)
pathAxisPosTolerance.
enableCommandValue
pathSyncAxisPosTolerance.
enableCommandValue
Tolerance value (configuration data) pathAxisPosTolerance.
commandValueTolerance
pathSyncAxisPosTolerance.
commandValueTolerance
Alarm when violation occurs 40401 Tolerance of the axis-specific
path setpoints exceeded
40126 Tolerance of the axis-specific
synchronous setpoints exceeded
Setpoint errors exceeded (system
variable)
pathMotion. limitCommandValue pathSyncMotion. limitCommandValue
Setpoint discrepancy between path
object specification and axis output
value (system variable)
pathMotion. differenceCommandValue pathSyncMotion.
differenceCommandValue
Relevant path object (system variable) pathMotion.activePathObject pathSyncMotion. activePathObject
2.10 Allowance for axis-specific traversing range limits
The traversing range limits of the path and positioning axes, i.e. active software limit
switches, are taken into account in the participating axes and not in the path object.
If a participating axis detects a possible violation of its axis-specific working area, an alarm is
triggered along with an appropriate error response.
2.11 Behavior of path motion when an error occurs on a participating
path axis or positioning axis
If an error occurs on a path axis or the positioning axis for path-synchronous motion causing
the axis motion to stop and the command to be canceled, the path interpolation is canceled
and the specified error response is performed.
See Local alarm response (Page 136).
The othe
r axes participa
ting in the path motion travel to velocity 0.0 with the maximum
dynamic values.

 Loading...
Loading...




