Basics of Path Interpolation
2.14 Motion sequence on the path object
TO Path Interpolation
Function Manual, 11/2010
73
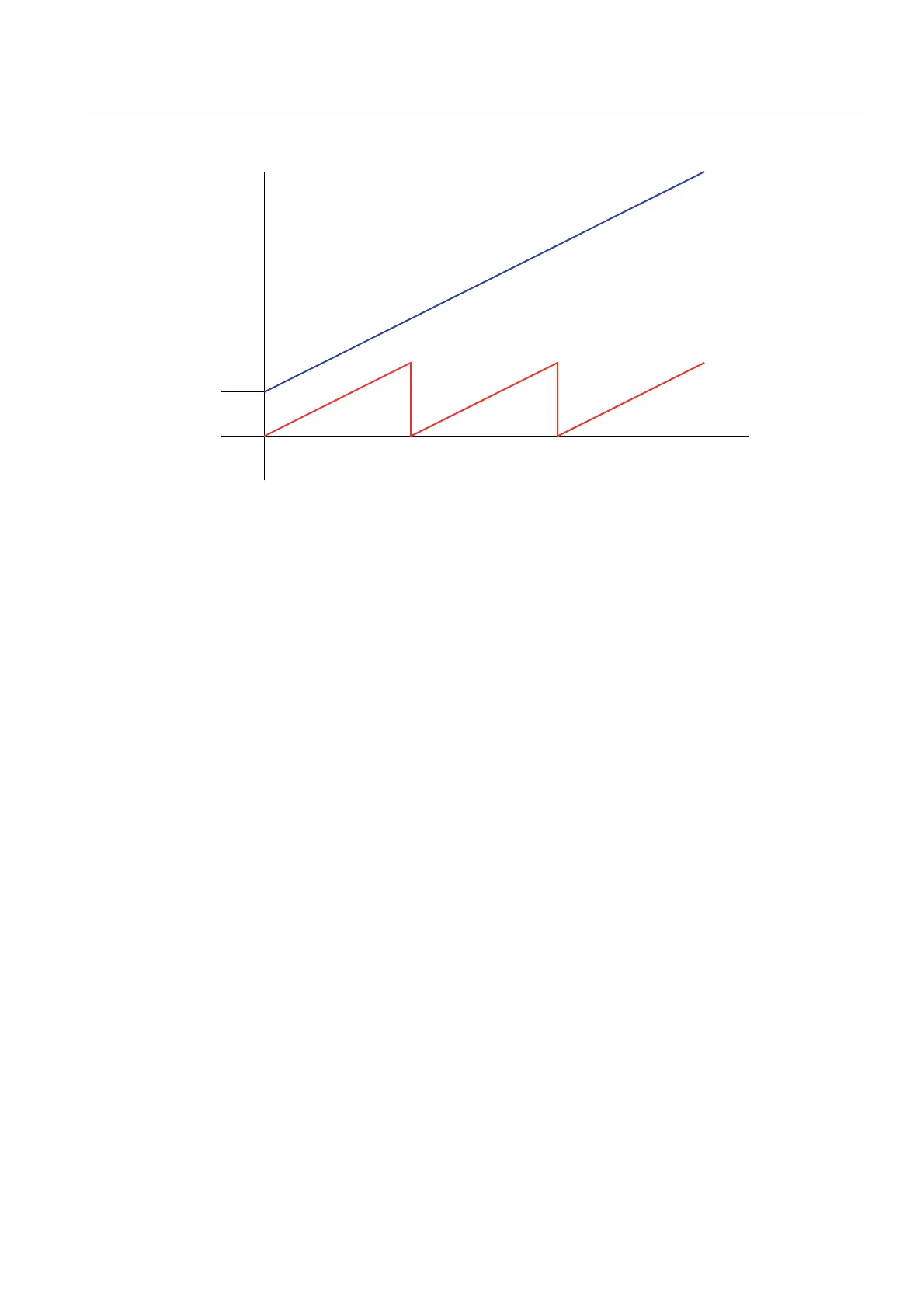
WUDFNLQJ3RVLWLRQ
WUDFNLQJ,Q3RVLWLRQ
0RWLRQVHTXHQFHUHIHUHQFHYDOXH
0RWLRQVHTXHQFHUHIHUHQFHYDOXH
WRWDOGLVSODFHPHQWRIWKH2&6
Figure 2-62 Behavior of trackingPosition for modulo-assigned value in trackingInPosition
Resetting trackingPosition
The _redefinePathObjectOCS() function can be used to set or translate trackingPosition only
when the kinematic end point is not synchronous to this OCS or currently being
synchronized (indicated using the trackingState:=INACTIVE variable).
There are 2 modes for translating the trackingPosition with the function
_redefinePathObjectOcs() - absolute or relative.
For the respective mode the value for trackingPosition can be calculated as follows:
● For mode:= RELATIVE
trackingPosition:=trackingPosition + value
● For mode:= ABSOLUTE
trackingPosition:=trackingPosition + value
The use of mode:=ABSOLUTE has the advantage that translating always refers to
trackingInPosition, which means that previous translations do not have to be buffered in the
application. For mode:= RELATIVE it is necessary to buffer the translation in the application.
The _redefinePathObjectOCS() and _setPathObjectOCS() functions are not executed for the
associated OCS when it is in the 'SYNCHRONIZED' status.
See
Terminate the coupling of the kinematic end poi
nt to a controlled OCS ('desynchro
nize')
(Page 75) for further information.
2.14.2.4 Synchronizing motion on the path object to the coupled OCS
A handling application for which, for example, a product is to be fetched from a moving
conveyor, is realized with an OCS coupled with the conveyor. The motion commands are
configured here so they act directly in the OCS.
This requires the motion calculated for the path object for the kinematic end point to be
synchronized to the coupled OCS.

 Loading...
Loading...




