Control mode U/f control or ux current control (FCC) Encoderless vector control
Properties
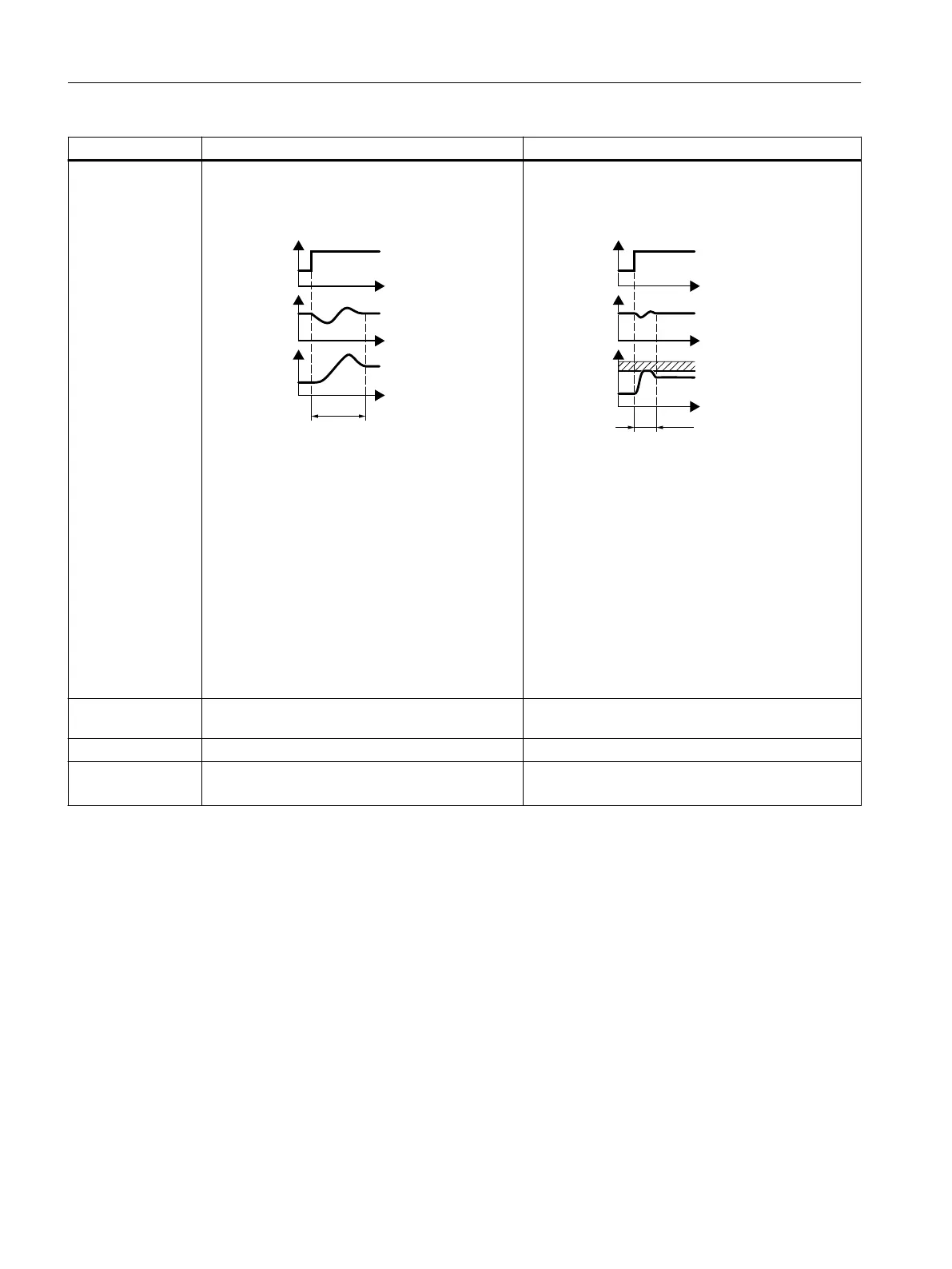
• Typical settling time after a speed change:
100ms…200ms
• Typical settling time after a load surge: 500 ms
6SHHG
/RDG
0RWRU
WRUTXH
W
W
W
PV
• The control mode is suitable to address the
following requirements:
– All motor power ratings
– Ramp-up time 0→rated speed (depend‐
ing on the motor power rating):
1s(0.1kW)…10s(45kW)
– Applications with increasing load torque
without load surges
• The control mode is insensitive with respect to
imprecise setting of the motor data
• Typical settling time after a speed change:
<100ms
• Typical settling time after a load surge: 200ms
6SHHG
/RDG
0RWRU
WRUTXH
W
W
PV
• The control mode controls and limits the motor
torque
• Typically achieves a torque accuracy: ±5% for
15%… 100% of the rated speed
• We recommend the control mode for the follow‐
ing applications:
– Motor power ratings >11kW
– For load surges 10%…>100% of the rated
motor torque
• The control mode is necessary for a ramp-up time
0 → rated speed (dependent on the rated motor
power): <1s(0.1kW)…<10s(132kW).
Max. output fre‐
quency
550Hz 240 Hz
Torque control Without torque control Speed control with lower-level torque control
Commissioning
• Contrary to encoderless vector control, the
speed controller does not have to be set
Commissioning
5.5Quick commissioning with a PC.
SINAMICS G120C Converters
150 Operating Instructions, 02/2023, FW V4.7 SP14, A5E34263257B AK
 Loading...
Loading...







