8.19.1 Autotuning the PID technology controller
Overview
Autotuning is a converter function for the automatic optimization of the PID technology
controller.
Requirement
The following requirements apply:
• The motor closed-loop control is set
• The PID technology controller must be set the same as when used in subsequent operation:
– The actual value is interconnected.
– Scalings, lter and ramp-function generator have been set.
– The PID technology controller is enabled (p2200=1 signal).
Function description
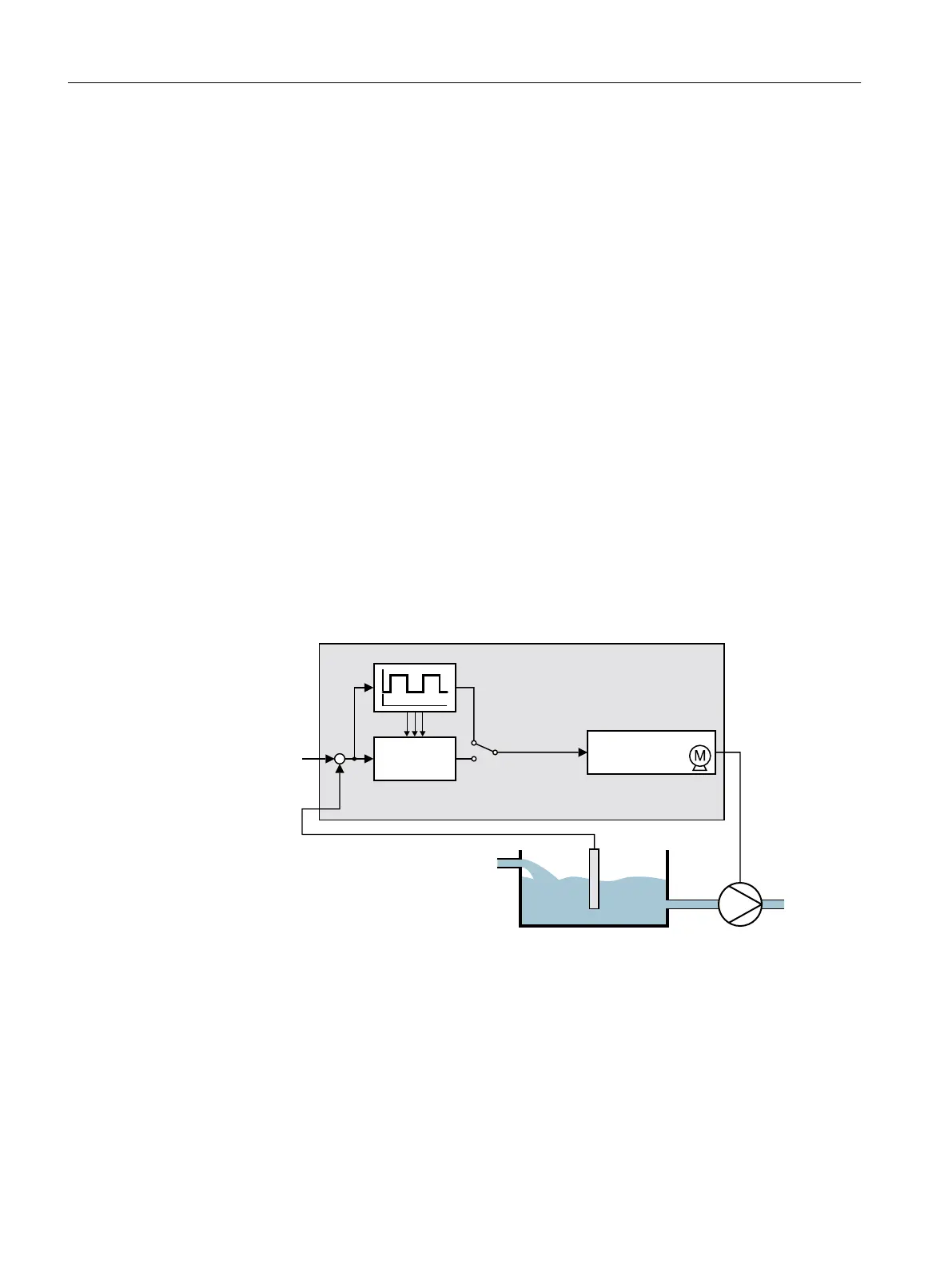
For active autotuning, the converter interrupts the connection between the PID technology
controller and the speed controller. Instead of the PID technology controller output, the
autotuning function species the speed setpoint.
3XPS
0RWRUFRQWURO
$FWXDOYDOXH
)LOOLQJOHYHO
VHWSRLQW
7HFKQRORJ\FRQWUROOHU
3,'DXWRWXQLQJ
6SHHG
VHWSRLQW
3,'
Figure8-44 Autotuning using closed-loop level control as example
The speed setpoint results from the technology setpoint and a superimposed rectangular
signal with amplitude p2355. If actual value = technology setpoint ± p2355, the autotuning
function switches the polarity of the superimposed signal. This causes the converter to excite
the process variable for an oscillation.
Advanced commissioning
8.19PID technology controller
SINAMICS G120C Converters
296 Operating Instructions, 02/2023, FW V4.7 SP14, A5E34263257B AK
 Loading...
Loading...







