Communication via CAN bus
AG06
Date: 07.02.2018 Art. No. 85674 Mod. status 055/18 Page 35 of 114
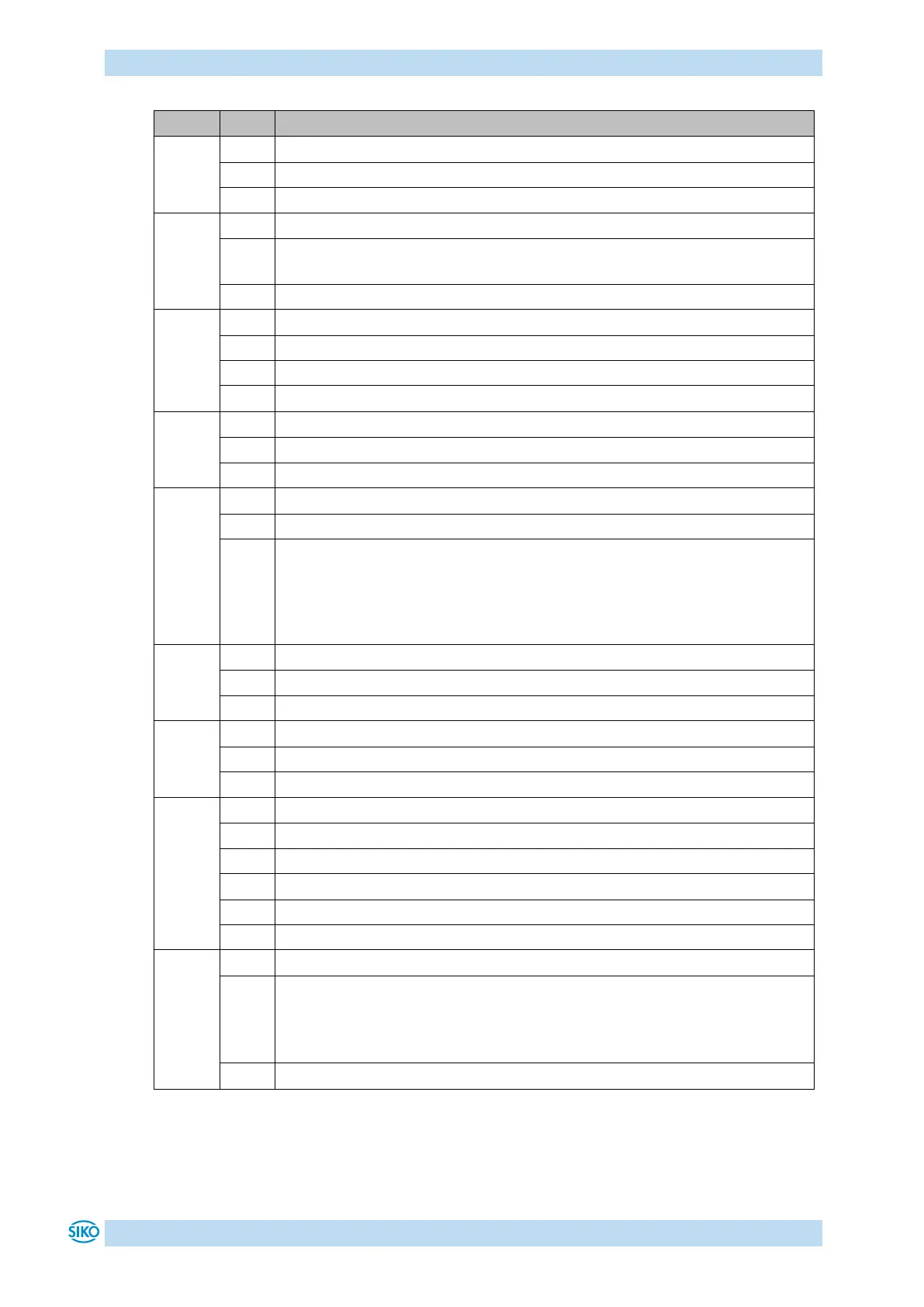
Actuator has switched to error. The cause of the error must be removed and
acknowledged.
Operating mode: Positioning mode: Loop travel
If travel direction unequal start direction (with loop travel).
If travel direction equal start direction.
Operating mode: Speed mode: irrelevant
Output stage supply voltage:
No voltage, no travelling possible.
Ready for travel:
- Actuator not in error state
- No active positioning
- Supply voltage of the output stage is applied
- Actual position within limits (only positioning mode)
Current limiting not active.
Operating mode: Positioning mode Status
Positioning active in positioning mode.
Operating mode: Speed mode: Status
Contouring error the actuator cannot reach the pre-set speed due to too
high load.
The actuator switches the contouring error fault.
Remedy: reduce programmed speed!
No contouring error actual speed corresponds to target speed.
Table 15: System Status Word