Communication via CAN bus
AG06
Date: 07.02.2018 Art. No. 85674 Mod. status 055/18 Page 37 of 114
9.3.2 Network management (NMT)
The master configures, manages and monitors network nodes via the NMT service.
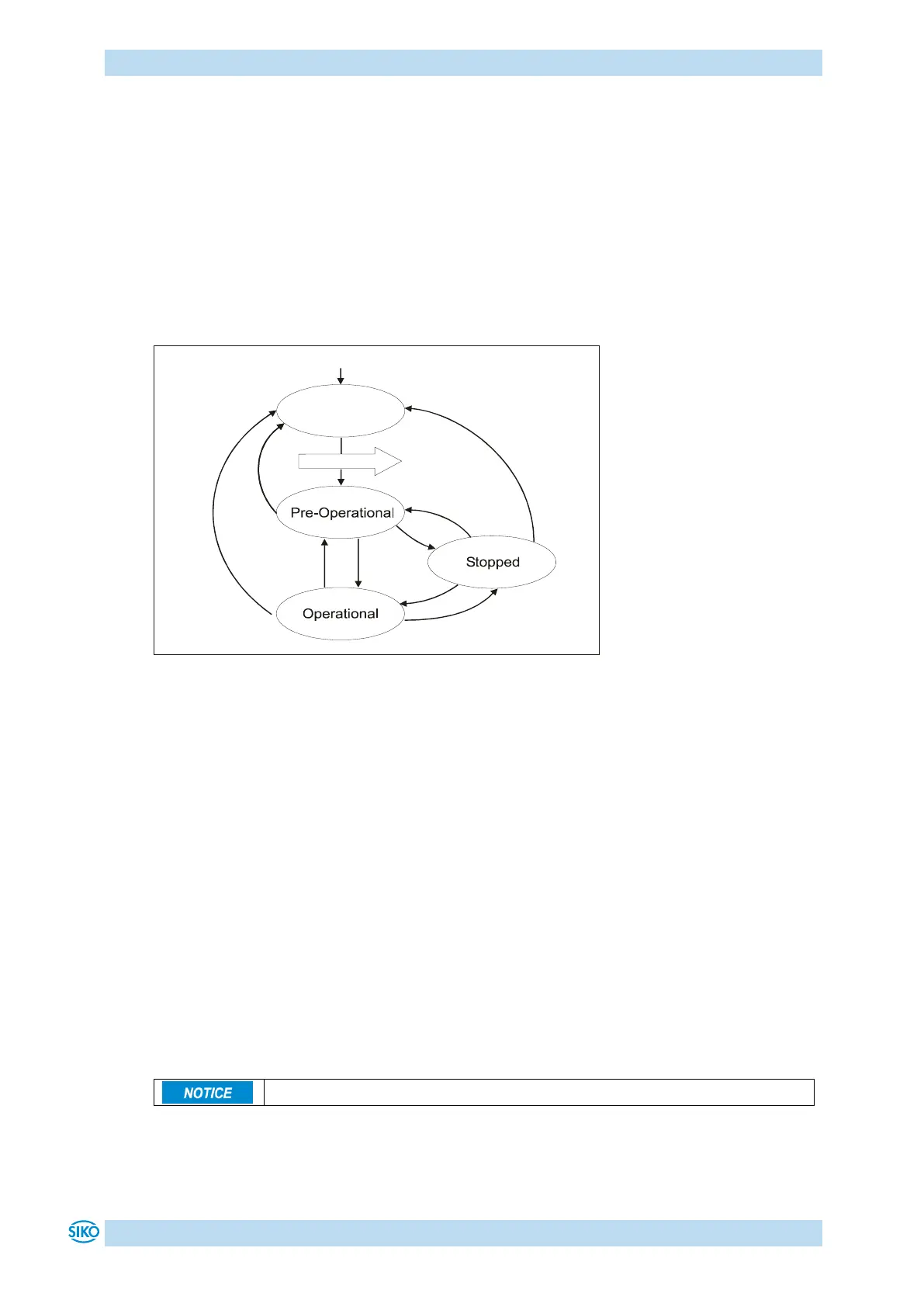
For switching between the four available communication states of a network node,
'INITIALISATION', 'PRE-OPERATIONAL', 'OPERATIONAL' and 'STOPPED', telegrams with the
identifier '0' as well as 2 bytes of user data are used. The identifier of the NMT protocol is
limited to 11 bits.
9.3.2.1 State Diagramm
Fig. 9: State Diagramm
9.3.2.2 NMT Status 'INITIALISATION'
The actuator is not involved in the bus actions in this state. All hardware and software
components are initialised. This state is attained after switching on the device or after receipt
of the command code 82
h
of the own or global addresses. After completion of initialisation,
the actuator goes automatically into the 'PRE-OPERATIONAL' status. This is signalled by a
boot-up message consisting of the identifier '1791 + Node ID' and a data byte having the
value '0'.
9.3.2.3 NMT Status 'PRE-OPERATIONAL'
The exchange of parameterization data (SDOs) between the actuator and the bus master is
enabled. However, no process data (PDOs) is transferred. Furthermore, the State Machine of
the actuator is set to the 'SWITCH ON DISABLED' state (see chapter 9.4: State Machine) and
the motor enabled.
PDO parameters can be changed in this state only!
Power on or Software Reset