Communication via CAN bus
AG06
Date: 07.02.2018 Art. No. 85674 Mod. status 055/18 Page 58 of 114
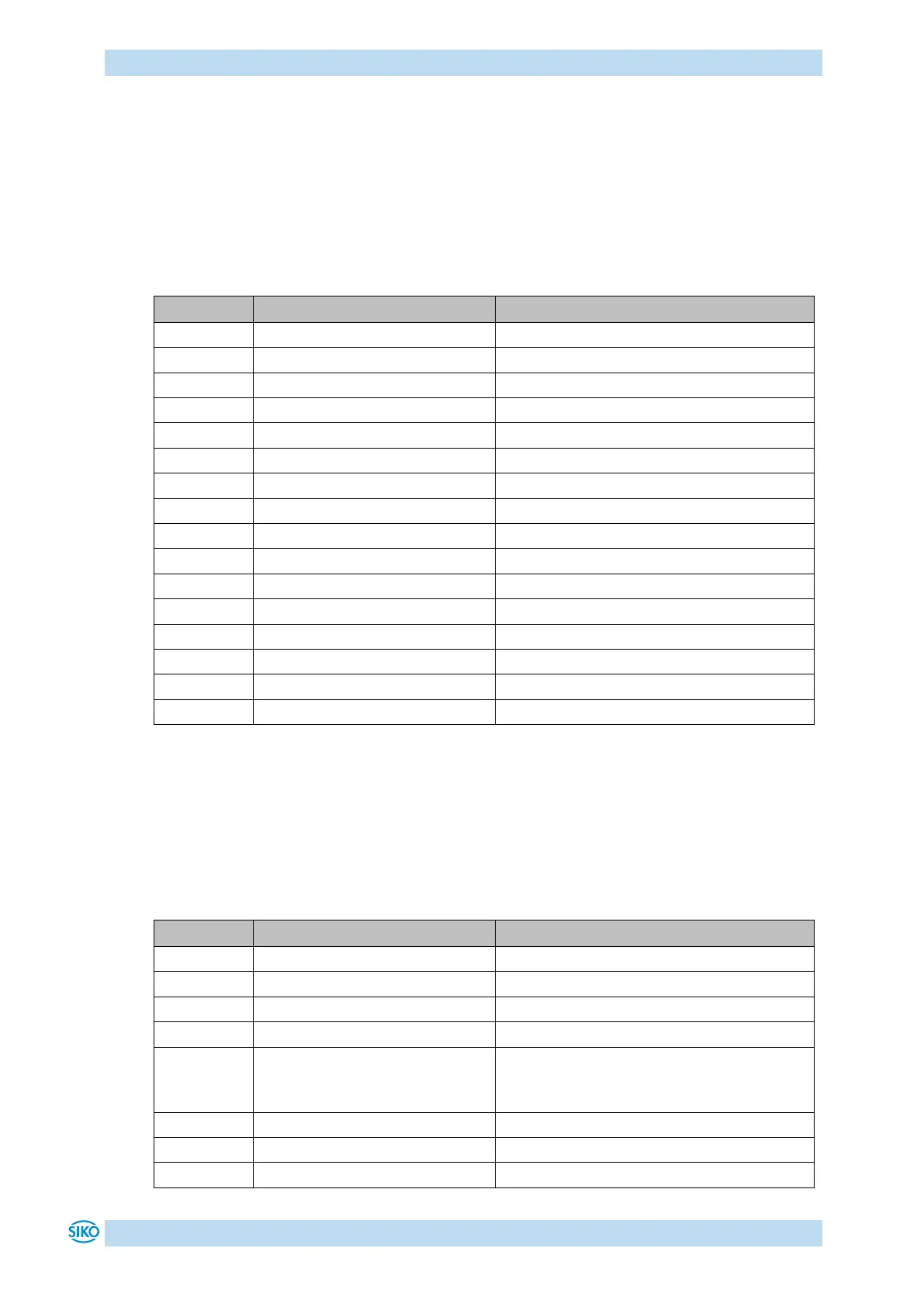
9.9 Examples
9.9.1 Example of the Profile Position Mode (positioning mode)
In the following table a positioning example in the Profile Position Mode (positioning mode)
is represented.
The node address of the actuator is 5 in this example.
RPDO1: Enable Operation command
0x1F 0x00 0x88 0x13 0x00 0x00
RPDO3: Travel to position +5000
wait until target position has been reached
RPDO1: clear New Setpoint
0x1F 0x00 0x78 0xEC 0xFF 0xFF
RPDO3: Travel to position -5000
RPDO1: continue positioning
wait until target position has been reached
RPDO1: clear New Setpoint
RPDO1: Disable Operation command
RPDO1: Disable Voltage command
NMT: Enter PRE-OPERATIONAL
Table 36: Positioning example in Profile Position Mode
9.9.2 Example of the Profile Velocity Mode (velocity mode)
In the following table an example in the Profile Velocity Mode (velocity mode) is represented.
The node address of the actuator is 5 in this example. Operating mode change via parameter
20, see chapter 8: Parameter description (Default: Profile Position Mode).
RPDO1: Enable Operation command
0x0F 0x00 0x0A 0x00 0x00 0x00
RPDO4: Start of velocity mode with the
target speed of +10 rev/min positive sense
of rotation
wait until target speed has been reached
0x0F 0x00 0x05 0x00 0x00 0x00
RPDO4: Change of velocity to +5 rev/min
RPDO1: Stop drive movement