Functional Description
AG06
Date: 07.02.2018 Art. No. 85674 Mod. status 055/18 Page 9 of 114
Fig. 3: Ramp travel, direct positioning mode
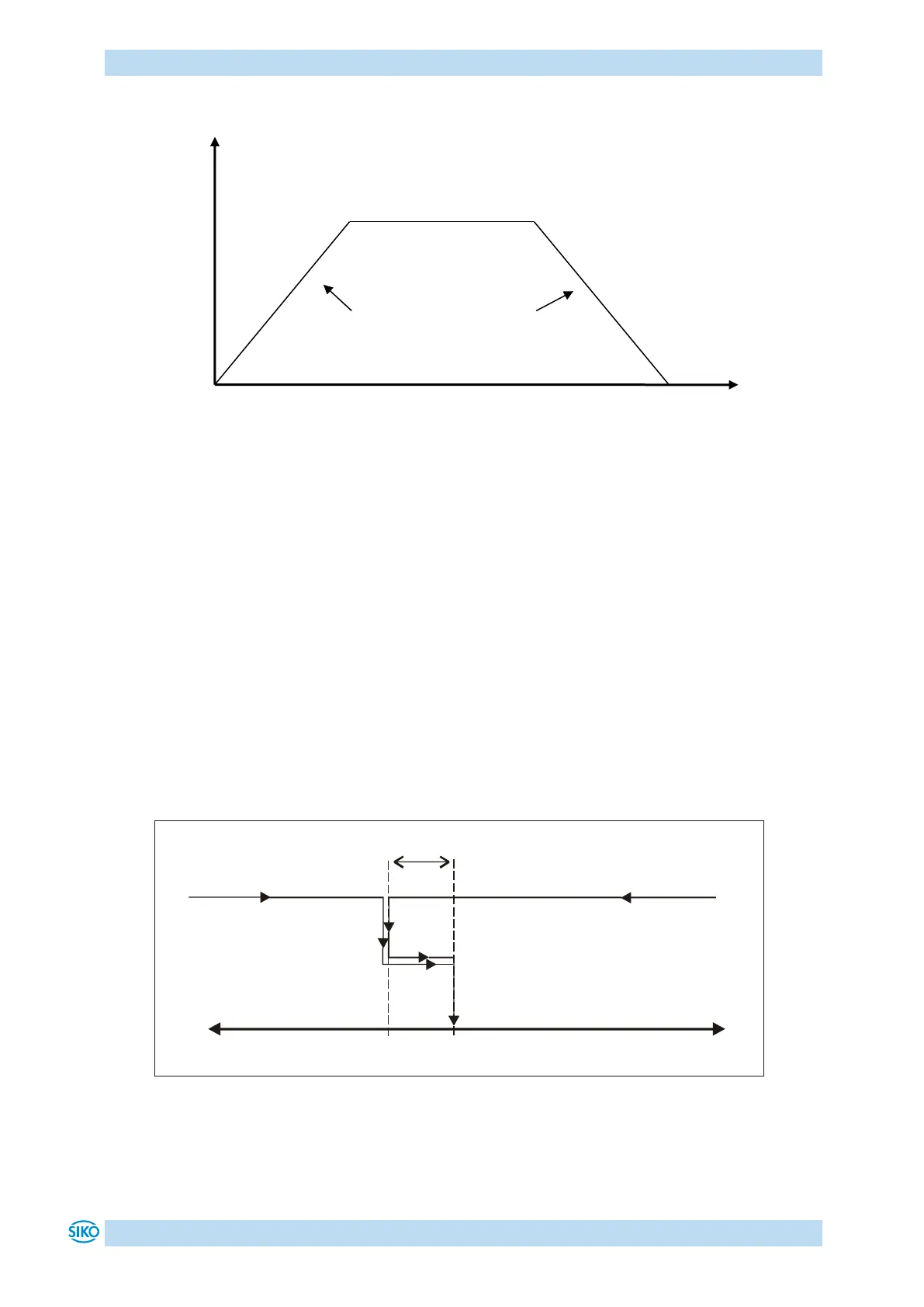
4.1.3.1.1 Loop positioning
If the actuator is operated on a spindle or an additional gear, the spindle or external gear
backlash can be compensated by means of loop positioning. In this case, travelling to the
target value is always from the same direction. This direction of approach can be defined.
Example:
The direction from which every target position shall be driven to is positive.
Case 1 new position is greater than actual position:
Direct travel to the target position
Case 2 new position is smaller than actual position:
The actuator drives beyond the target position by the loop length; afterwards, the set
point is approached in positive direction.
Fig. 4: Positioning Loop+
(Parameter no. 5)
Acceleration = deceleration
(Parameter no. 4)
Positioning in positive
direction
Positioning in negative
direction