Communication via CAN bus
AG06
Date: 07.02.2018 Art. No. 85674 Mod. status 055/18 Page 53 of 114
Bit 9 is set when the actuator is in the NMT status
'OPERATIONAL' or 'STOPPED'. The actuator receives commands
via CAN interface in this case.
Profile Position Mode:
Target reached
Bit 10 is set when the drive has come to a stop at the pre-
defined target position within the defined window after a
successfully executed positioning command.
Profile Velocity Mode:
Target reached
Bit 10 is set when the actual speed is within the defined
window of the target speed.
Bit 11 is set when the upper or lower limits have been
exceeded.
Profile Position Mode:
Set Point
Acknowledged
Bit 12 is set when the drive controller has started a travel
command in the positioning mode.
A travel job is started via bit 'New Setpoint' in the control word
(object 6040
h
: control word bit 4) (value 0 1).
Subsequently, the controller firmware plausibilizes the target
position, the operation and control parameters and the local
state of the drive and sets bit 12 after the check has been
passed successfully.
Bit 12 is deleted when bit 4 in the control word has been reset
to zero following a positioning job (Clear new setpoint).
Profile Velocity Mode:
Speed
Bit 12 is set when the drive stands still.
Profile Position Mode:
Pos active
Bit 14 is set when there is an active positioning job in the
operation mode 'Profile Position Mode' (positioning mode).
Notice! No new setpoint is accepted and travelling in inching
operation is disabled as long as bit 14 is set!
no meaning, statically on 0
Profile Position Mode:
drive travels
The drive shaft of the actuator is moving if bit 15 is set.
Table 31: Bit description of the status word
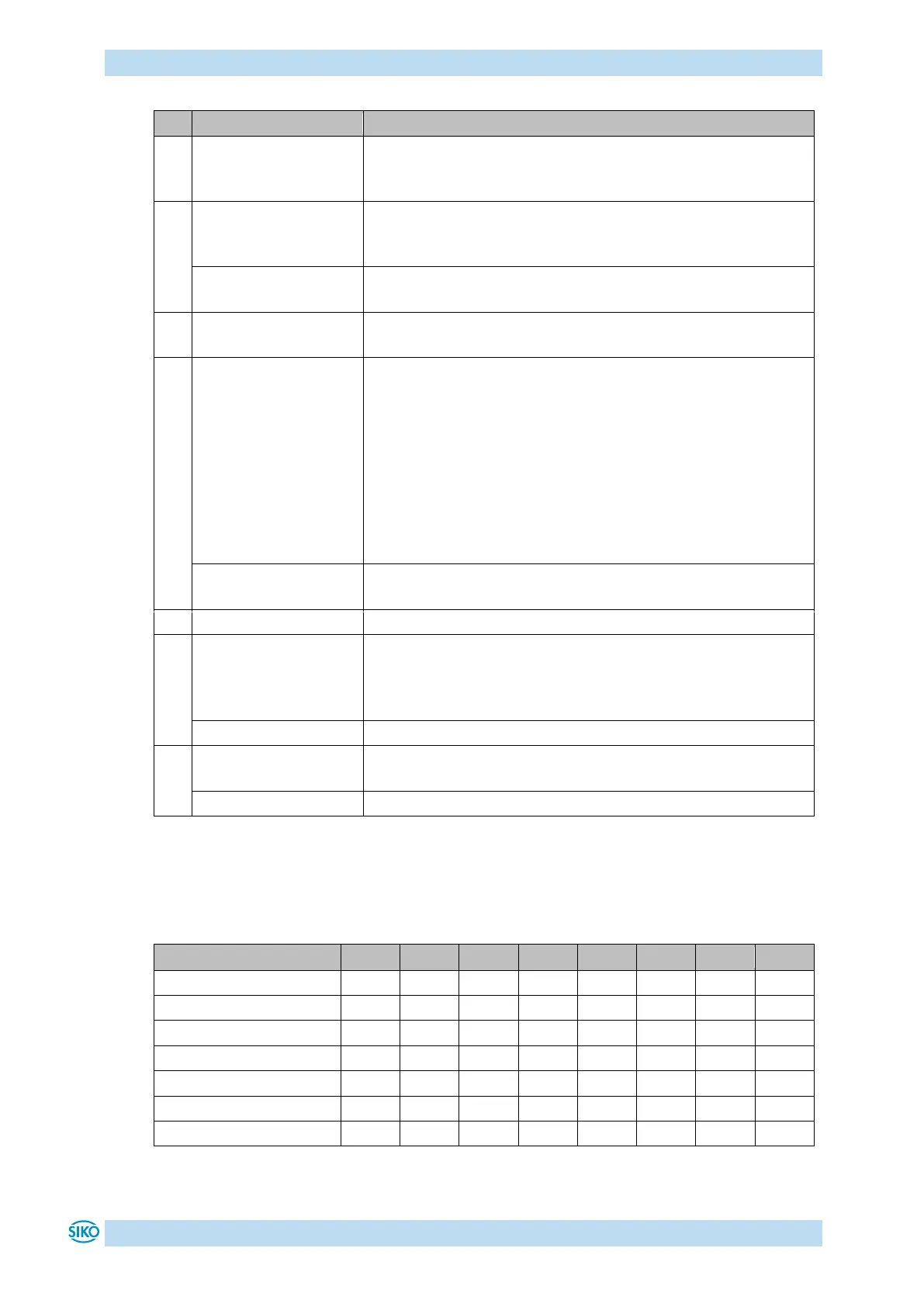
The following table represents the possible states of the state machine and the resulting bit
values.
The field containing an x are irrelevant for the states of the state machine.
Table 32: Low byte status word States of the state machine