11 Appendix
11.2.2 MECHATROLINK-III Common Parameters
11-22
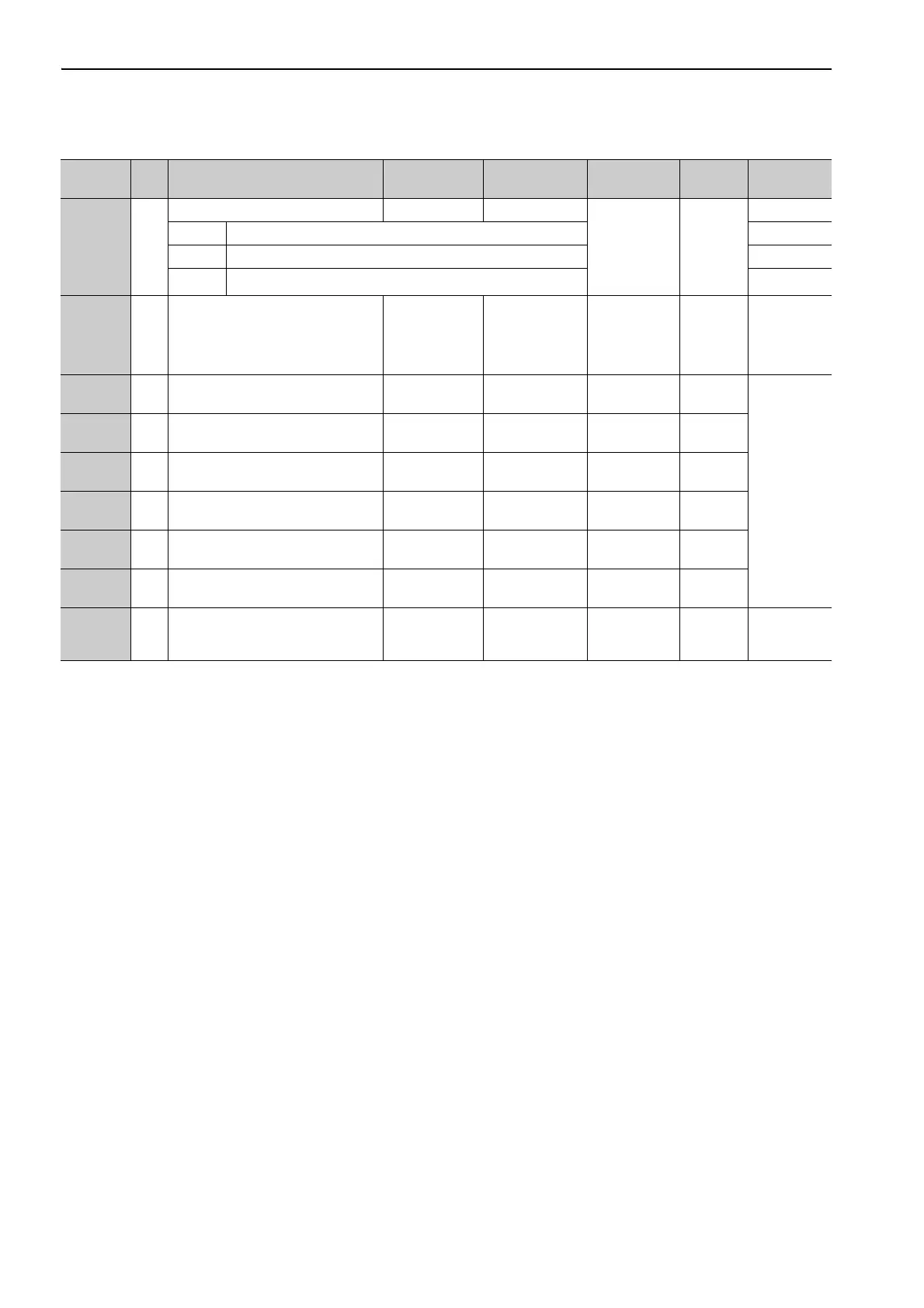
47
PnA8E
4
Torque Unit 1 and 2 –
1
After
restart
0000H Not supported
0001H Percentage (%) of rated torque
0002H
Max. torque/40000000H
*4
48
PnA90
4
Torque Base Unit
*4
(Set the value of “n” used as the
exponent in 10
n
when calculating
the Torque Unit (47).)
–5 to 0 – 0
After
restart
61
PnAC2
4 Speed Loop Gain
1000 to
2000000
0.001 Hz
[0.1 Hz]
40000
Immedi-
ately
Adjustment
Related
Parameters
62
PnAC4
4 Speed Loop Integral Time Constant 150 to 512000
μs
[0.01 ms]
20000
Immedi-
ately
63
PnAC6
4 Position Loop Gain
1000 to
2000000
0.001/s
[0.1/s]
40000
Immedi-
ately
64
PnAC8
4 Feedforward Compensation 0 to 100 1% 0
Immedi-
ately
65
PnACA
4
Position Loop Integral Time Con-
stant
0 to 5000000
μs
[0.1 ms]
0
Immedi-
ately
66
PnACC
4 Positioning Completed Width
0 to
1073741824
1 reference unit 7
Immedi-
ately
67
PnACE
4 NEAR Signal Width
1 to
1073741824
1 reference unit 1073741824
Immedi-
ately
Adjustment
Related
Parameters
∗4. When 0002H is selected for the Torque Unit (parameter 47), set the Torque Base Unit (parameter 48) to 0.
∗5. Change the setting when the reference is stopped (DEN is set to 1), because the change will affect the output during
operation.
Note: When using parameters that are enabled after restarting the SERVOPACK, a CONFIG command must be input or
the power must be turned OFF and then ON again.
(cont’d)
Parameter
No.
Size Name Setting Range
Units
[Resolution]
Factory
Setting
When
Enabled
Classifica-
tion

 Loading...
Loading...






